-
深入理解计算机系统——第八章 Exceptional Control Flow
深入理解计算机系统——第八章 Exceptional Control Flow
- 8.1 Exceptions
- 8.2 Processes
- 8.4 Process Control
- 8.5 Signals
- 8.6 Nonlocal Jumps
- 8.7 Tools for Manipulating Processes
资源:
control transfer: From the time you first apply power to a processor until the time you shut it off, the program counter assumes a sequence of values a 0 , a 1 , . . . , a n a_{0}, a_{1}, ... , a_{n} a0,a1,...,an, where each a k a_{k} ak is the address of some corresponding instruction I k I_{k} Ik. Each transition from a k a_{k} ak to a k + 1 a_{k+1} ak+1 is called a control transfer.
control flow: A sequence of such control transfers is called the flow of control, or control flow, of the processor.
最简单的控制流的类型是这一系列的指令是顺序执行的,没有跳转等情况。
exceptional control flow (ECF):控制流中的指令不是顺序执行,如发生跳转,函数调用,函数返回等。
理解 ECF 的重要性:
- ECF 是操作系统实现 I/O,进程和虚拟内存的基本机制,只有理解 ECF,才能理解这些概念。
- 理解 ECF 帮助理解应用程序怎么和操作系统交互。
- 理解 ECF 能帮助写应用程序。
- 理解 ECF 能帮助理解并发。
- 理解 ECF 能帮助理解软件的异常处理。
本章主要介绍应用程序怎么和操作系统交互。
8.1 Exceptions
Exceptions are a form of exceptional control flow that are implemented partly by the hardware and partly by the operating system.
An exception is an abrupt change in the control flow in response to some change in the processor’s state. Figure 8.1 shows the basic idea.

8.1.1 Exception Handling
exception number:系统中每种类型的异常都有一个唯一的非负的整数,即异常号。有些异常号是处理器的设计者分配的,有些是操作系统内核(操作系统中常驻内存的部分) 的设计者分配的。
系统启动时,操作系统会分配并初始化一个被称为异常表(exception table)的跳转表:

从图 8.2 可以看见,异常表的每个条目(entry)都包含该异常对应的 handler 的地址。
在运行时(run time),如果处理器检测到有异常发生,并根据异常类型找到异常号后,则会通过异常表执行一个间接 procedure call (the exception)到一个操作系统子程序(the exception handler,专门设计处理这种特殊的事件)。
图 8.3 展示怎么通过异常号找到 exception handler 的地址:异常表的起始地址存在 CPU 的一个叫异常表基址寄存器(exception table base register)中,该地址再加上异常号(异常表的索引号)则为 exception handler 的地址。
一旦触发异常,剩下的工作由软件中的 exception handler 来完成。
8.1.2 Classes of Exceptions
异常有如下四种类型:

Interrupts
中断是异步发生的,来自 I/O 设备的信号,硬件中断的异常处理程序(exception handlers)被称为中断处理程序(interrupt handlers)。
当中断处理完后,将控制返回给中断前将要执行的下条指令,效果是程序继续之前控制流中的指令执行,好像从未发生过中断。
Traps and System Calls
陷阱(traps)最重要的用途是在用户程序和内核之间提供一个类似过程的接口,即系统调用(system call)。内核是常驻内存中的一部分,为程序提供各种服务,但内核是受保护的,不能被应用程序直接访问,内核通过提供接口来为应用程序服务。

Faults
故障(faults)是由错误情况引起的,如果故障处理程序(fault handler)修正了错误,则重新执行引起故障的指令(非下一条指令);如果无法修正错误,则返回到内核中的 abort routine,终止程序。

Aborts
终止(aborts)是不可修复的致命错误造成的结果,不会将控制权返回给应用程序。

8.1.3 Exceptions in Linux/x86-64 Systems
以 x86-64 系统为例,有256种异常类型,见下图:

Linux/x86-64 Faults and Aborts
-
Divide error
当应用程序试图除以0或者除法指令的结果过大。Linux 对于这种错误会提示 “Floating exceptions”。 -
General protection fault
一般保护故障,原因很多,如程序引用虚拟内存的一块未定义区域,或者程序试图写只读文本段。Linux 不会修复这类故障,提示为 “Segmentation faults”。 -
Page fault
第九章介绍 -
Machine check
致命的硬件错误造成的结果,在执行故障指令时检查到,不会将控制权返回给应用程序。
Linux/x86-64 System Calls
Linux 有几百个系统系统调用,部分常用的系统调用见下图:

system-level functions:系统调用以及相关的包装函数(wrapper functions)。
8.2 Processes
process: An instance of a running program.
进程提供两个抽象:
- Logical control flow
每个程序似乎独占 CPU(provided by kernel mechanism called contex switching)。 - Private address space
每个程序似乎独占内存(provided by kernel mechanism called virtual memory)。
Each program in the system runs in the context of some process.
上下文(context):由程序需要正确运行所需的状态组成。This state includes the program’s code and data stored in memory, its stack, the contents of its general purpose registers, its program counter, environment variables, and the set of open file descriptors.
8.2.1 Logical Control Flow
logical control flow:程序计数器(PC)的值组成的序列。
示例:
上图中三个进程交替的执行。
8.2.2 Concurrent Flows
concurrent flow:一个逻辑流在执行时和另一个逻辑流在时间上重叠。例如图 8.12 中进程 A 和进程 B,进程A 和进程 C 都是并发的运行,因为进程A未结束,进程B和进程C就开始运行了;但进程B和进程C不是并发运行。
multitasking:多个进程之间轮流执行。
time slice: Each time period that a process executes a portion of its flow. 图 8.12 中进程A有两个时间片。
Thus, multitasking is also referred to as time slicing.
parallel flows:Two flows are running concurrently on different processor cores or computers.
8.2.3 Private Address Space
对于一个 n-bit 地址的机器,地址空间是 2 n 2^{n} 2n 种可能地址的集合,范围为 0 , 1 , . . . 2 n − 1 0, 1, ... 2^{n}-1 0,1,...2n−1。
一个进程为每个程序提供它自己的私有地址空间。
This space is private in the sense that a byte of memory associated with a particular address in the space cannot in general be read or written by any other process.Figure 8.13 shows the organization of the address space for an x86-64 Linux process.

8.2.4 User and Kernel Modes
处理器通过一个控制寄存器中的 mode 位来赋予当前进程享有的特权。
当模式位(mode bit)被设置后,处理器运行在内核模式(kernel mode)或叫超级用户模式(supervisor mode),在该模式下,进程能执行任何指令,访问任何内存位置。
当未设置模式位,进程运行在用户模式(user mode),该模式下不能执行特权指令(privileged instructions),也不能直接运用内核的代码或数据,如果尝试做这些操作则会引起致命的保护故障,用户程序只能通过系统调用接口间接访问内核的代码和数据。
进程在最初运行应用程序时处于用户模式,进程变为内核模式的唯一的方法是通过异常,如中断,故障或陷入系统调用,此时控制权会交给异常处理程序(exception handler),进程变为内核模式,handler 运行在内核模式,当控制权返回给应用程序后,进程又回到用户模式。
linux 提供
/proc文件系统,允许用户模式的进程访问内核数据结构的内容。8.2.5 Context Switches
Processes are managed by a shared chunk of memory-resident OS code called the
kernel.context switch:操作系统内核通过一种被称作 上下文切换(context switch) 的高阶异常控制流来实现多任务。
内核为每个进程维持一个上下文,该上下文是内核需要启动一个被抢占的进程所需要的状态,包括 general-purpoe regisers,浮点寄存器,程序计数器,用户栈,状态寄存器等的值。
scheduling :在某个时刻,内核决定抢占(preempt)当前进程并开始一个先前被抢占的进程,这个决定被称为调度(scheduling),该过程是由内核中被称为调度器(scheduler)的代码执行的。
当内核选择一个新的进程来运行时,称为内核调度(scheduled)该进程。
在内核调度一个新的进程后,它通过一种被称为上下文切换(context switch) 的机制 抢占当前的进程然后将控制转移给新的进程:
- 保存当前进程的上下文
- 恢复某个之前被抢占的进程的上下文
- 将控制转移给这个新的恢复的进程
上下文切换 发生的情景:
- 内核执行系统调用的时候。如果系统调用阻塞(block),如需要等待某个事件发生,则内核能让当前进程休眠,然后执行其他进程。
- 由中断引起。如所有的系统都有某种机制来产生周期性的定时器中断,通常每 1ms 或 10ms,每次定时器产时中断,内核将判断当前进程是否已经运行了足够长的时间以及是否切换到另一个进程。
示例:

初始进程 A 在用户模式运行,然后遇到一个
read系统调用指令,因此变为内核模式,由于该系统调用需要很长时间从磁盘读数据,因此内核执行一个上下文切换,开始执行进程B,注意在切换到进程B前,内核代表进程A在用户模式执行指令(内核不是独立的进程)。在第一次上下文切换时,内核代表进程A在内核模式执行指令,然后在某刻开始代表进程B在内核模式执行执行,在完成上下文切换后,内核代表进程B在用户模式执行指令,接着进程B在用户模式执行指令直到磁盘发送中断信号表示已经将磁盘读内容传到内存,此时内核将再次进行上下文切换,将控制返回给进程A来执行系统调用之后的指令。
8.3 System Call Error Handling
Linux 系统级的函数遇到错误时,通常返回-1,然后设置一个全局整数变量
errno来表明出错的原因。
Hard and fast rule:
- 检查系统级函数的返回结果
- Only exception is the handful of functions that return void
8.4 Process Control
Unix provides a number of system calls for manipulating processes from C programs.
8.4.1 Obtaining Process IDs
每个进程都有一个唯一的正数表示的进程 ID(process ID, PID)。
getpid函数返回调用该函数的进程,即当前进程的 PID。
getppid函数返回父进程的 PID。8.4.2 Creating and Terminating Processes
从程序员的角度看,进程有以下三种状态:
-
Running
进程正在执行,或者等着被执行(最终会被内核调度)。 -
Stopped
进程被挂起(suspended)且不会被调度。A process stops as a result of receiving a SIGSTOP, SIGTSTP, SIGTTIN, or SIGTTOU signal, and it remains stopped until it receives a SIGCONT signal, at which point it becomes running again. -
Terminated
进程永久性的暂停。三种情况造成进程终止:接收到一个信号,该信号的默认行为就是终止进程;从主程序返回;调用 exit 函数。
exit 函数:

- 无返回值
- The exit function terminates the process with an exit status of status. (The other way to set the exit status is to return an integer value from the main routine.)
创建进程
一个父进程能通过调用 fork 函数创建子进程:

int fork(void):- 调用一次但返回两次:在调用的进程(父进程)中返回子进程的 PID,在子进程中返回 0。
- 子进程和父进程有相同的(但分开的)用户级虚拟地址空间,以及所有打开的文件描述符,只是 PID 不同(因为PID 是正数,因此可以通过返回值区分父进程和子进程)。
示例:

上图所示,在第6行调用 fork 后,可以看到父进程和子进程的地址空间相同,有相同的变量值,代码等,但他们的地址空间是分开的,因此执行完 printf 后,两者的 x 值不同。
Modeling fork with Process Graphs
A process graph is a useful tool for capturing the partial ordering of program statements:
- Each vertex is the execution of a statement
- a -> b means a happens before b
- Edges can be labeled with current value of variables
- printf vertices can be labeled with output
- Each graph begins with a vertex with no inedges
For a program running on a single processor, any topological sort (total ordering of vertices where all edges point from left to right) of the graph corresponds to a feasible total ordering. (拓扑排序)
之前程序的进程图如下:
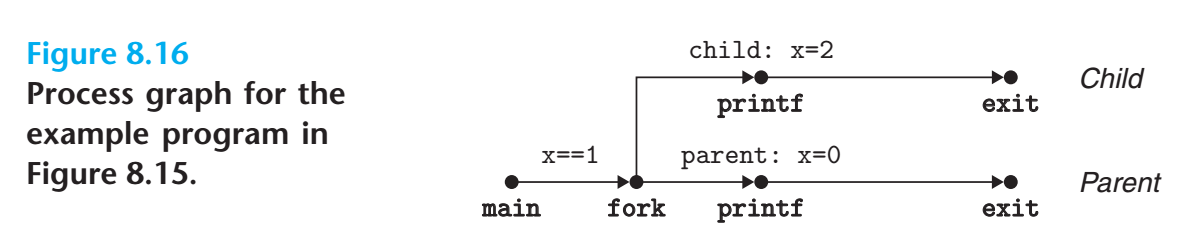
从上图可以,父进程和子进程的 printf 语句可以以任何顺序执行(父进程先执行或者子进程先执行)。
进程图也能帮助理解 nested fork 调用,如:

8.4.3 Reaping Child Processes
当进程终止(terminated)时,内核不会立即将它从系统中移除,进程保持一种终止状态(terminated state)直到被父进程回收(reaped)。
父进程回收终止的子进程时,内核将子进程的 exit state 传递给父进程,然后抛弃该子进程。
zombie:处于终止状态(terminated state)但没有被回收的进程成为僵尸进程。僵尸进程仍然消耗系统资源。
当一个父进程终止,内核将调用 init 进程来回收那些孤儿进程(orphaned children)。init 的 PID 为1,是内核在系统启动时创建的,不会终止,也是所有进程的祖先。
一个进程可以通过调用 waitpid 函数来等待子进程终止。

- 默认情况,即
options为 0,waitpid将挂起调用它的进程的执行,直到等待集合(wait set)中的一个子进程终止。 - 如果在调用
waitpid时子进程已经终止,则该函数立即返回。 - 以上两种情况子进程成功终止时
waitpid返回令它返回的子进程的 PID,此时,被终止的子进程已经被回收,内核会删除它在系统中的所有痕迹。
Determining the Members of the Wait Set
等待集合(wait set)中的成员由参数
pid决定:- pid > 0
等待集合只有一个子进程,该子进程的 PID 就是 pid 的值。 - pid = -1
等待集合中包含父进程的所有子进程。
Modifying the Default Behavior
可用通过修改
options参数为 WNOHANG,,WUNTRACED 和 WCONTINUED 的各种组合来修改默认行为:-
WNOHANG
如果目前在等待集合中没有子进程终止,则立即返回 0,而不用等待子进程终止。其他情况则和默认行为相同。 -
WUNTRACED
将调用它的进程挂起(suspend)直到等待集合中有一个进程变成终止(terminated)或者停止(stopped)的状态,并返回造成该函数返回的子进程的 PID。 -
WCONTINUED
将调用它的进程挂起(suspend)直到等待集合中有一个运行的进程变成终止(terminated)或者一个停止(stopped)的进程接收到 SIGCONT 信号而重新开始执行。 -
WNOHANG | WUNTRACED
如果等待集合中没有终止或者停止的子进程,则立即返回0,否则返回已经终止或者停止的子进程的 PID。
Checking the Exit Status of a Reaped Child
If the statusp argument is non-NULL, then waitpid encodes status information about the child that caused the return in status, which is the value pointed to by statusp.
wait.h中定义了几个宏来解释 status 参数:
Error Conditions
如果调用
waitpid函数的进程没有子进程,则waitpid函数返回 -1,并设置errno为ECHILD;
如果waitpid函数被信号中断,则返回 -1 并设置errno为EINTR。The wait Function
The wait function is a simpler version of
waitpid:
Calling
wait(&status)is equivalent to callingwaitpid(-1, &status, 0).Examples of Using waitpid
示例1:

- 11 行创建了 N 个子进程;
- 12 行每个子进程以不同的退出码退出;
- 15 行父进程调用
waitpid来等待所有的子进程终止,第一个参数pid为 -1,指等待集合中包含所有的子进程,第二个参数statusp不为空,因此返回信息包含子进程的状态信息,第三个参数options表示用默认选择,即子进程终止才会返回; - 15 行第一个循环,返回子进程的 pid 为正数,进入循环,16 行检测状态,如果子进程是正常终止,则打印消息;
- 循环一直进行,直到最后一个子进程终止后,因为无子进程,15 行条件语句中 pid 返回 -1,因此跳出循环;
- 因为结束循环时 waitpid 调用无子进程,因此正常情况
errno为ECHILD;
注意:这里回收子进程没有顺序的,也是无法预知顺序的。
示例2:

图 8.19 与图 8.18 相比,变化是在 16 行,
waitpid的第一个参数不是 -1,而是一个特定子进程的 pid,因此等待集合只包含该子进程,保证了回收的顺序和创建的顺序一致。8.4.4 Putting Processes to Sleep
The sleep function suspends a process for a specified period of time.

返回值:
- 0
设定的时间已经达到 - 剩下的秒数
设定的时间未达到,如 sleep 函数还未达到时间就被信号中断
pause
pause 函数:让调用它的函数处于休眠(sleep)状态,直到进程接受到信号:
#includeint pause(void); //总是返回 -1 - 1
- 2
8.4.5 Loading and Running Programs
execve
- The execve function loads and runs a new program in the context of the current process.
- Overwrites code, data and stack
- Retains PID, open files and signal context
- Called once and never returns except if there is an error

The execve function loads and runs the executable object file
filenamewith the argument listargvand the environment variable listenvp.返回值:成功则不返回,失败则返回 -1。
第一个参数
filename可以是二进制文件,或者以#!开头的脚本文件。第二个参数
argv是一个指向数组的指针:
通常第一个元素
argv[0]是可执行文件的名字。第三个参数环境变量
envp也是一个指向数组的指针:
envp的每个数组元素都是name=value的组合。在
execve加载完文件后,调用 start-up 代码,最后将控制传递给主函数(执行 main 函数)。当
main函数开始执行时,栈中的组织结构如下:
- 栈的顶端是 start-up 函数
libc_start_main; - 然后是
argv参数,每个元素argv[i]是一个指针,指针指向箭头所示的字符串区域; - 接着是环境变量
envp,也是指针,指向栈低端字符串区域;
getenv
Linux provides several functions for manipulating the environment array:

getenv根据name看查找环境变量,找到则返回指向value的指针,否则返回空指针。setenv

如果环境变量数组中有
name=oldvalue形式,则unsetenv会删除它,然后setenv设置新名字,但需要overwrite参数不为 0;如果name不存在,则setenv则会在环境数组中添加一对name = newValue的组合。8.5 Signals
A signal is a small message that notifies a process that an event of some type has occurred in the system.
- Akin to exceptions and interrupts
- Sent from the kernel (sometimes at the request of another process) to a process
- Signal type is identified by small integer IDs (1-30)
- Only information in a signal is its ID and the fact that it arrived

8.5.1 Signal Terminology
Sending a signal: The kernel sends (delivers) a signal to a destination process by updating some state in the context of the destination process.
The signal is delivered for one of two reasons:
- The kernel has detected a system event such as a divide-by-zero error or the termination of a child process.
- Another process has invoked kill system call to explicitly request the kernel to send a signal to the destination process.
Receiving a signal: A destination process receives a signal when it is forced by the kernel to react in some way to the delivery of the signal.
Some possible ways to react:
- Ignore the signal (do nothing).
- Terminate the process (with optional core dump).
- catch the signal by executing a user-level function called a signal handler.
信号处理的过程:

pending signal: 已经发送但没有被接收的信号叫待处理信号(pending signal)。
- 任何时候一种类型最多只有一个待处理信号
- 如果一个进程已经有一个类型为 k 的待处理信号,则以后发送的类型为 k 的信号会被丢弃
进程能选择性的 阻塞(block) 某个特定信号的接受,但一个信号被阻塞时,不会影响该信号的发送,但不会被接收,直到进程取消对其的阻塞。
待处理信号最多只能被接收一次。
Kernel maintains pending and blocked bit vectors in the context of each process.
- pending: represent the set of pending signals
- Kernel sets bit k in pending when a signal of type k is delivered
- kernel clears bit k in pending when a signal of type k is received
- blocked: represents the set of blocked signals
- Can be set and cleared by using the sigprocmask function
- Also referred to as the signal mask
8.5.2 Sending Signals
Process Groups
每个进程都属于一个特定的进程组(process group),进程组由一个正整数 process group ID 标识。
可以通过
getpgrp函数来返回当前进程的 process group ID。#include//Returns: process group ID of calling process pid_t getpgrp(void); - 1
- 2
- 3
默认情况下,子进程和父进程属于同一个进程组,进程组ID 相同,但各自的进程ID不同。
可以通过函数
setpgid函数来修改自己或其他进程的进程组:#include//Returns: 0 on success, −1 on error int setpgid(pid_t pid, pid_t pgid); - 1
- 2
- 3
该函数将进程
pid的进程组修改为pgid,如果pid为0,则使用当前进程的进程ID(PID);
如果pgid为 0,则使用进程pid的PID作为进程组ID 。例如:进程 15213 调用函数
setpgid(0,0),则创建一个进程组ID为 15213 的进程组,并将进程 15213 加入到该组中。Sending Signals with the /bin/kill Program
The /bin/kill program sends an arbitrary signal to another process.
下面命令发送信号 9(SIGKILL)到进程 15213:
linux> /bin/kill -9 15213- 1
PID为负数时:下面命令发送信号 9(SIGKILL)到进程组 15213 中的每个信号:
linux> /bin/kill -9 -15213- 1
Sending Signals from the Keyboard
Unix shells use the abstraction of a job to represent the processes that are created as a result of evaluating a single command line.
任何时刻,最多有一个前台作业(foreground job) 和 零个或多个后台作业(background jobs)。
如:输入以下命令
linux> ls | sort- 1
则会创建一个包含两个进程的前台作业,这两个进程由 Unix 管道(pipe)连接,一个运行
ls程序,另一个运行sort程序。shell 为每个作业创建一个独立的进程组,进程组ID 为作业中的某个父进程的进程ID。

按
Ctrl+C会造成内核发送SIGINT信号给前台进程组的每个信号,默认情况下将会 终止(terminate) 前台作业。按
Ctrl+Z会造成内核发送SIGTSTP信号给前台进程组的每个信号,默认情况下将会 暂停(stop) 前台作业。Sending Signals with the kill Function
进程通过调用
kill函数来发送信号到自己和其他进程。#include#include //Returns: 0 if OK, −1 on error int kill(pid_t pid, int sig); - 1
- 2
- 3
- 4
pid大于0,则该函数发送信号sig给进程ID为pid的进程 。pid等于0,则该函数发送信号sig给调用该函数的进程的进程组ID中的所有进程 (包括调用函数的进程)。pid小于0,则该函数发送信号sig给进程组ID为-pid的所有进程 。
Sending Signals with the alarm Function
进程可以通过调用
alarm函数给自己发送SIGALRM信号。#include//Returns: remaining seconds of previous alarm, //or 0 if no previous alarm unsigned int alarm(unsigned int secs); - 1
- 2
- 3
- 4
alarm函数让内核在secs秒后给调用它的进程发送SIGALRM信号。If secs is 0, then no new alarm is scheduled.
In any event, the call to alarm cancels any pending alarms and returns the number of seconds remaining until any pending alarm was due to be delivered (had not this call to alarm canceled it), or 0 if there were no pending alarms. (alarm函数使用方法)
8.5.3 Receiving Signals
当内核将进程 p 从内核模式切换到用户模式时,会检测该进程的未阻塞的待处理信号(unblocked pending signals)。
- 如果没有符合条件的信号,则内核将控制传给进程 p 的逻辑控制流中的下一条指令;
- 如果有符合条件的信号,则内核选择其中一个信号 k (通常是该信号集合中最小的数)然后强迫进程接收信号 k。
进程接收信号后会触发某种行为(action)。
然后对集合中剩下的信号重复上述操作,直到集合为空。(这个步骤书里没写,视频里讲的,所以会将集合中全部的信号都处理?)
进程完成上述行为后,控制将会回到进程 p 逻辑控制流的下一条指令。
每种类型的信号都有预定的默认的行为(见前面图 8.26):
- 终止(terminate)进程
- 终止(terminate)进程并 dumps core
- 暂停(stop)进程直到被信号 SIGCONT 重启
- 忽略信号
调用
signal函数可以修改信号的默认行为(SIGSTOP 和 SIGKILL 两种信号除外):#includetypedef void (*sighandler_t)(int); //Returns: pointer to previous handler if OK, //SIG_ERR on error (does not set errno) sighandler_t signal(int signum, sighandler_t handler); - 1
- 2
- 3
- 4
- 5
- 6
signal函数改变信号signum的行为:- 如果
handler是SIG_IGN,则忽略类型为signum的信号 - 如果
handler是SIG_DFL,则类型为signum的信号使用默认行为 - 其他情况,
handler是一个用户定义函数的地址,称为 信号处理程序(signal handler),当进程接收到类型为signum的信号是将调用该程序。
设置信号处理程序(installing the handler):通过传递处理程序的地址给信号函数来改变信号的默认行为。
捕获信号(catching the signal):调用信号处理程序。
处理信号(handling the signal):执行处理程序。
示例:图 8.30 修改信号
SIGINT的行为:

图 8.31 展示信号处理程序被其他处理程序中断的例子:
8.5.4 Blocking and Unblocking Signals
Linux 提供 隐式(implicit) 和 显示(explicit) 的机制来阻塞信号。
- Implicit blocking mechanism: 默认情况下,内核会阻塞当前处理程序正在处理的同类型的待处理信号。
- Explicit blocking mechanism: 应用程序能通过
sigprocmask函数和它的辅助函数来显示的阻塞或者解除阻塞选择的信号。
显示阻塞机制:

sigprocmask函数改变当前阻塞信号的集合(8.5.1 中讲的 blocked bit vector),具体行为依赖how的值:- SIG_BLOCK:将
set中的信号添加到 blocked bit vector 中((blocked = blocked | set)) - SIG_UNBLOCK:将
set中的信号从 blocked bit vector 中移除(blocked = blocked & ~set) - SIG_SETMASK:blocked = set
如果
oldset是非空的值,则之前的 blocked bit vector 的值会存在 oldset 中。操作信号
set:sigemptyset函数将set初始化为空集合sigfillset函数将每个信号添加到set集合中sigaddset函数将signum添加到set集合sigdelset函数从set集合中删除信号signumsigismember函数当信号signum在set集合中时返回 1,否则返回 0
示例:

8.5.5 Writing Signal Handlers
Safe Signal Handling
Handlers run concurrently with the main program and share the same global variables, and thus can interfere with the main program and with other handlers.
写安全的信号处理程序:
- 处理程序越简单越好
- 只调用异步信号安全函数(async-signal-safe functions),这类函数是可重入的(reentrant),也不能被信号处理函数中断。
- 保存和恢复
errno,许多 Linux 的异步信号安全函数在返回错误时会设置errno,在处理程序内部调用这类函数可能干扰其他依赖errno的程序;针对这种情况,可以在进入处理程序时保存errno到一个局部变量中,然后在处理程序返回前恢复它的值。这种方式只针对处理程序会返回的情况。 - 通过阻塞所有信号来保护共享全局数据结构的访问,如果处理程序和主程序或者其他处理程序共享某个全局数据结构,则在访问(读或写)该数据结构时,处理程序和主程序等共享数据的程序应该临时的阻塞所有的信号。
- 用
volatile来声明全局变量,强迫编译器每次引用全局变量时从内存中读值。 - 用
sig_atomic_t声明标志,通常处理程序会写全局标志(global flag) 来记录信号的接收,主程序会周期性的读这个标志,响应信号,清除标志。对于这种方式共享的标志,C 提供了一个整数sig_atomic_t来实现 原子的(atomic) 读写,因为该过程可以用一条指令volatile sig_atomic_t flag;实现。
异步信号安全函数(async-signal-safe functions):

信号处理函数中产生输出的唯一安全的方式是使用
write函数。Correct Signal Handling
前面提到过
pending bit vector中每种类型的信号只会包含一个,后面如果又有同类型的待处理信号会被丢弃,因此一个待处理的信号只能表示至少有一个该类型的信号到达。示例:

上面例子输出结果如下:
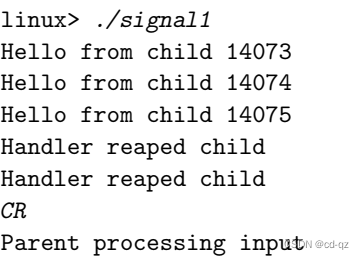
当子进程终止或者暂停时,内核会给父进程发送
SICHILD信号,上述代码中用signal函数来修改父进程接收到SICHILD信号时的行为,用信号处理程序 handler1 来回收终止的子进程,在 handler1 中,waitpid用if语句,即只处理一个终止的子进程。如果第一个子进程终止发送信号后由 handler1 正在处理,此过程中第二个子进程也终止发送了信号,因此成为待处理信号,然后第三个子进程也终止,由于第二个子进程还未处理,该信号被丢弃。
因此第三个信号不会被回收。
修改信号处理程序如下:
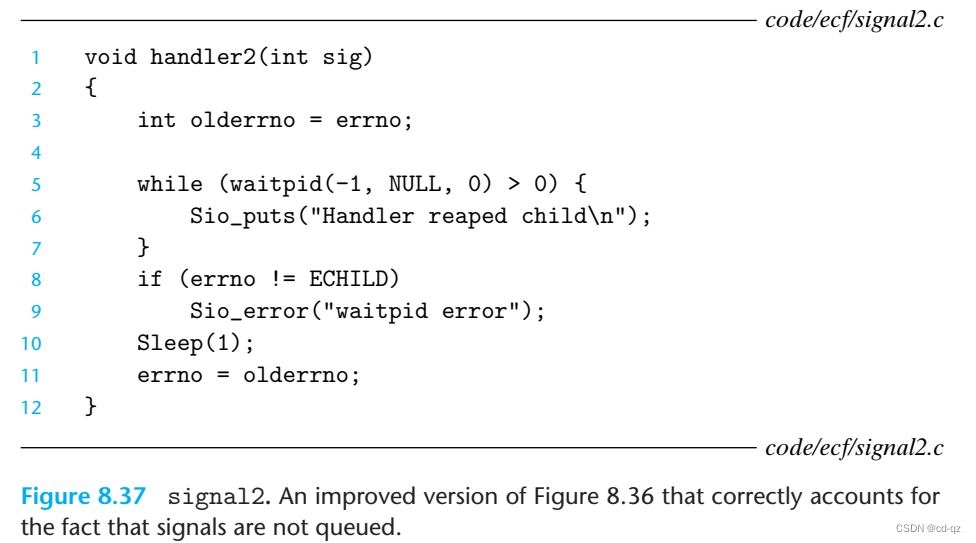
变化是
waitpid调用编程while,因此只要有终止的子进程,就处理,尽可能多的处理终止的子进程。Portable Signal Handling
不同的系统有不同的信号处理语义:
-
The semantics of the signal function varies
有些老的 Unix 系统在信号 k 被信号处理程序捕获后会将信号的行为恢复为默认行为,而在其他系统,处理程序必须调用signal函数来显式的设置。 -
System calls can be interrupted
慢速系统调用(slow system call):一些系统调用如read,wait 和 accept会潜在的阻塞进程很长时间。在一些老的 Unix 版本,当处理程序捕获信号时,被中断的慢速系统调用在处理程序返回时不会继续执行,而是立即返回错误条件,因此程序员必须手动重启被中断的系统调用。
可以使用
Signal函数来解决上述问题:

Signal函数的调用方式和signal函数相同。其信号处理语义为:
- 只有当前被处理的信号类型才会阻塞
- 信号不会排队等待(前面提过)
- 被中断的系统调用会尽可能的自动重启
- 一旦设置了信号处理程序,将一直保持该设置,直到调用
Signal函数且参数handler是SIG_IGN或SIG_DFL。
8.5.6 Synchronizing Flows to Avoid Nasty Concurrency Bugs
第12章介绍。
书中例子讲解见视频课程。
8.5.7 Explicitly Waiting for Signals
有时候主程序需要显式的等某个特定的信号处理函数运行。
示例:

5-10行:信号
SIGCHLD的处理程序,当子程序终止时,设置pid的值为子进程的PID;20-21行:分别为信号
SIGCHLD和SIGINT设置两个信号处理程序;23行:将
SIGCHLD信号放到mask信号组中;26行:阻塞信号组
mask中的所有信号,此时mask中的信号为SIGCHLD;27-28行:创建一个子进程,如果失败则退出;
31行:设置全局变量的值
pid为 0;32行:将信号组
prev的信号设置为blocked bit vector中的值,因为prev组中没有SIGCHLD信号,因此该信号被解除阻塞;35-36行:31 行设置了
pid为0,因此在 32 行解除SIGCHLD信号阻塞后,如果未回收子进程,即SIGCHLD的处理程序未执行,则会会一直执行while循环,等待子进程回收,这是pid大于 0,因此退出循环;分析:该程序无问题,但35-36行的
spin loop浪费资源。解决方案:
方案一: 如果将 35-36行 替换为:while (!pid) /* Race! */ pause(); //8.4.4 节介绍 pause 函数- 1
- 2
pause函数在 8.4.4 节有介绍:该函数会令当前进程暂停直到被信号中断。
C语言中的pause()函数和alarm()函数以及sleep()函数可能遇到的问题:进入循环后,但在执行
pause()前,接收到SIGCHLD信号,则pause可能会一致被阻塞,除非有SIGINT信号,此时pid非零,跳出循环。
方案二: 如果将 35-36行 替换为:
while (!pid) /* Race! */ sleep(1); //8.4.4 节介绍,休眠 1 秒钟- 1
- 2
不会有
pause函数出现的问题,但需要选择一个合适的休眠时间。
方案三: 使用
sigsuspend#include//Returns: −1 int sigsuspend(const sigset_t *mask); - 1
- 2
- 3
该函数等价于一个原子的(atomic) 版本:
sigprocmask(SIG_BLOCK, &mask, &prev); pause(); sigprocmask(SIG_SETMASK, &prev, NULL);- 1
- 2
- 3
在
pause前阻塞所有的信号,因此pause不会被中断。8.6 Nonlocal Jumps
(没仔细看,视频没讲这一部分)
C 提供一种用户级别的异常控制流,成为非本地跳转(nonlocal jump),它能将控制直接从一个函数转移给另一个当前执行的函数,而不需要经过正常的
call-and-return步骤。非本地跳转有
setjmp和longjmp函数提供。#includeint setjmp(jmp_buf env); int sigsetjmp(sigjmp_buf env, int savesigs); //Returns: 0 from setjmp, nonzero from longjmps - 1
- 2
- 3
- 4
setjmp函数保存env缓冲区的当前calling environment,然后给longjmp使用,并返回 0.The calling environment includes the program counter, stack pointer, and general-purpose registers.
The value that setjmp returns should not be assigned to a variable.
longjmp函数:#includevoid longjmp(jmp_buf env, int retval); void siglongjmp(sigjmp_buf env, int retval); //Never returns - 1
- 2
- 3
- 4
longjmp函数从env缓冲区恢复calling environment,然后触发一个从最近的初始化env的setjmp调用的返回,然后setjmp返回一个非零值retval。The setjmp function is called once but returns multiple times: once when the setjmp is first called and the calling environment is stored in the env buffer, and once for each corresponding longjmp call.
On the other hand, the longjmp function is called once but never returns.
应用:
- 从一个多级嵌套的函数调用中立即返回。
- Branch out of a signal handler to a specific code location, rather than returning to the instruction that was interrupted by the arrival of the signal.
8.7 Tools for Manipulating Processes
Linux 系统提供了大量监测和操作进程的有用工具:

-
相关阅读:
Shopee买家通系统之如何注册虾皮账号
Python进阶学习(3)绑定方法
01Linux中安装Nginx的步骤
(自学)黑客————网络安全技术
Redis集群3.2.11离线安装详细版本(使用Ruby)
字节跳动大裁员,测试工程师差点遭团灭:大厂招人背后的套路,有多可怕?
今天,该让 python 上个热门
多御安全浏览器升级1.7.6版,新增扫描二维码功能
BFS专题6 字符迷宫
LeetCode0416.分割等和子集 Go语言AC笔记
- 原文地址:https://blog.csdn.net/Lee567/article/details/126443390