-
【Chips】如何用DPI调用C++程序,并成功仿真
Title:如何用DPI调用C++程序,并成功仿真
-
前言
之前试了用DPI调用C程序,很方便,两行解决:
- 一行在Verilog/SV中加
import "DPI-C" function int 函数名; - 一行在VCS compile中补上此C文件名;
上周五因需要,计划用DPI调用C++程序,结果!好多好多bug!找了整整一天!折磨!
为什么会这么久、这么痛苦嘞?
- 网上DPI的信息少,google上都不多;
- 搜来搜去,title起的是《DPI调用C/C++程序》,结果通篇只能调C程序,右半边的C++压根不能用好吧,编译过没哈?就忽悠人…
- 好不容易找到一些信息,都解决不了问题,太general或者 无效啊无效!
刷了一天google、睡眼惺忪;
看到几个帖子兴冲冲;
百般实验一场空.
好在最后捣鼓出来了。俺很高兴,记录一下!(默认是 Linux下)
主要是
g++封装成动态库、SV中使用动态库的过程,太曲折了! - 一行在Verilog/SV中加
1 基本概念
1.1 编译、链接、执行
A 基本flow与文件后缀
源代码文件 -> 编译 -> 链接 -> 执行.
-
Windows下:
- C文件分别 编译,分别得到
.obj文件; - 多个
.obj文件 静态链接 后得到.lib文件,多个.obj文件 动态链接 后得到.dll文件; - 各库文件(静态库或动态库),再次链接 后可得到可执行文件
.exe
- C文件分别 编译,分别得到
-
Linux下:
-
C文件分别 编译,分别得到
.o中间文件(是 可以单独执行 的); -
多个
.o文件 静态链接 后得到.a静态库文件,多个.o文件 动态链接 后得到.so共享的动态库文件;共享库必须放在特定系统目录下,不然需手动指定.
-
各库文件,再次链接 后可得到可执行文件(
无后缀);
-
多语言混合编程时:可以各自分别编译成.o文件,再链接成可执行文件.
B g++ 下编译、链接语法
以Linux为例.
-
g++进行 编译 语法
g++ -c file1.cpp file2.cpp ... filen.cpp把文件们 分别 编译成库文件.o -
g++进行 静态链接 的语法
用linux
ar指令,没用到故没看,可见:linux ar命令 —— CSDN xuhongning -
g++ 生成可执行文件
g++ file.cpp -o target把所有文件 链接成一个target 可执行文件
顺序可以自己打乱,但是-o后面接的一定是target 文件. -
g++进行 动态链接 的语法
生成动态链接库:
g++ filename.cpp -fPIC -shared -o target.so把文件 链接 生成 动态链接库target.so动态链接库 可以嵌套:
g++ -o target -L./lib -lcpp
使用动态链接库得到 可执行文件target.-
其中option解释:
-
-fPIC:生成动态链接库; -
-shared:编译为位置独立的代码,否则动态链接库动态载入时是以代码拷贝方式满足多进程,不是真正的代码共享. -
-L后直接紧跟(无空格!坑死我了!)动态lib库的目录path;若不写,系统默认会去:
/lib、/usr/lib、/usr/local/lib三个系统path下查找依赖的动态库;否则必须自己用-Lxxx指定(即使是当前路径下,也得用-L指定). -
-l后直接紧跟(无空格!)动态lib的名字(不是文件名!)e.g. 动态lib的文件名为
libmath.so,则此动态链接库的lib名是math!
注意: 利用动态库,新生成 可执行文件 或 新的动态库 后(为方便,称新生成的东西为target),使用时,可能会因 “查询不到动态库” 而失败.
(报错:
cannot open shared object file: No such file or directory)——这是因为:-
虽然 g++ 支持用相对路径或
-L来指定 待生成动态库、现有动态库的path,但在shell中、VCS中 执行可执行文件或引用现有动态库时,不支持沿用之前g++链接时的相对路径或-L访问嵌套动态库的 path!(是不是很离谱)故,最后执行“可执行文件”或“用VCS调用动态库”时,需要把所有用到的动态库都放在 当前路径下.
可用linux指令
ldd 文件来检查 此文件所需的动态lib 的路径是否可found! -
所有用到的动态库,都得在
target的目录下 或系统lib目录下(上面提到的三个lib目录). -
要单独执行
target的话,须cd到target 目录下 执行,不可用相对路径执行:
i.e.:./target✔️ ;./myfile/target❌
-
-
部分Reference
-
1.2 Linux下C与C++的文件后缀
-
.c、.cc、.cpp后缀的区别主要是给compiler识别用的。
.c是C文件;C++是
.cc和.cpp:unix系统用.cc;非unix系统用.cpp;其实都是C++文件,实际上可以混用.
1.3 DPI 是什么
-
目的
verilog中有一些内建的系统调用,如:
$display(...)、sformatf(...);那若我想在verilog中调用自定义的C程序咋办?可以用 PLI接口,也可以用 VPI 接口,也可以用 DPI接口.
-
PLI、VPI、DPI
-
PLI (verilog Programming Language Interface) ,是Verilog HDL的simulator environment的一个API协议,可以在verilog中调用C程序. 本来捏是 PLI1.0,但是用起来挺麻烦的,于是优化了一下,进化成了 PLI 2.0 ——VPI.
-
VPI (Verilog Procedial Interface) ,也是用于 Verilog HDL调用C程序的接口协议,是PLI的新版本,已收录于IEEE 1364,比PLI 1.0调用C程序的方法更简单点,但还是挺麻烦的,于是在VPI上面封装一层,第三个接口出现 ——DPI.
-
DPI (Direct Programming Interface),比VIP调用C语言更简单,但是少了一些功能性.
PLI 和 DPI 的内容此处略,后续另文写。它们仨给我最大的感觉就是:
PLI在verilog中调用最简单的 “helloworld” 的C程序,需要5步:
- 写C routine,其中 调用PLI;
- 把C的function associate 到system task上;
- 登记此system task(使env认识它);
- 把C程序compile、link一下;
- 在HDL中 调用system task来执行 C程序。
VPI调用 “helloworld” 的C程序,需要4步,少了上面的第二步.
DPI调用 “helloworld” 的C程序,只需要3步!
- 正常写C程序,然后把C程序compile、link一下;
- RTL中加:
import "DPI-C" function void helloword(); - 在RTL中调用即可.
C程序本来就要编译;RTL中本来就要call程序;四舍五入一下,DPI中call简单的C程序,只需要1步——加个
import ...就好了,是不是很方便~ ( ̄▽ ̄)" -
2 如何在DPI中调用C++
-
基本flow
DPI是不能直接调用C++的,只能调用C程序。
故实现思路 是:将C++程序用C进行封装、编译成动态库,再用DPI进行调用.
以下【2.1】、【2.2】是循序渐进的.
2.1 C中如何调用C++程序
-
C中调用C++:
-
写个C++文件,把C++的函数用
extern "C"{...}括起来进行定义意思是:这段C++代码在编译时,要按C的规则来进行编译,这样后续C程序才能调用这段C++的代码。
-
为什么C++程序在C中用,需要加
extern?更多细节,可见它:extern “C“ 用法详细说明 —— CSDN 小学徒 其中的[3.1]可以解惑为什么C++需要加
extern.
-
-
C中不需要也不能 include C++的头文件,因为C语法中没有关键字
extern,include后反而会报错;应当:- 用
g++把C++文件compile成.so(动态链接库); - 再 用
gcc把C文件以及C++的.so一起compile成新的动态库.so或 可执行文件,根据需要即可(我们要用于后续DPI,因此是compile成 新的动态库).
- 用
-
2.2 用VCS通过DPI调用C++程序
-
基本概念
SV是systemverilog;
我用的EDA是VCS;
我VCS用的是 two-step flow(即compile+simulation). -
前提精要
-
DPI 只能call C程序;
否则 VCS compile不会报错,但仿真会报错找不到RTL内 import的DPI函数…
-
VCS直接编译C文件来实现DPI时(i.e. 用
vcs c文件来直接编译C/C++文件),因为VCS会根据后缀调用gcc或g++来编译(C文件就调用gcc,C++文件就调用g++),故我们最后用C封装后的程序文件后缀只能为.c,不能写为.cc或.cpp;否则 VCS compile不会报错,但仿真会报错找不到RTL内 import的DPI函数…
这俩情况,导致我找bug找得半死…
P.S. 后续我们并不会用VCS来编译C文件,这里只是顺嘴提一下。
-
最后对C文件 进行动态链接实现DPI调用的 C动态库时,生成
.so必须用gcc而不是g++
-
-
具体步骤:
-
把C++ code 内的函数 用
extern修饰; -
把C++ code用
g++编译链接成动态库A.so; -
C程序直接调用C++code中的函数,然后把 C程序、C++的动态库 一起 用
gcc封装成 动态库B.so;注意:不需要也不能 在C code中include C++文件,我们是用C++的动态库进行编译、链接的.
-
在SV或Verilog中加语句:
import "DPI-C" function int 函数名();返回值可以自己调;
C函数内若是 void返回值类型,就使用SV的task类型而不是funciton. -
VCS的compile语句正常写,不需要用VCS来编译C coode,但要使用:
vcs -full64不然后续仿真会报错:
shared library access error: ELFCLASS64,这是因为 C程序默认是64位的,VCS不加-full64却变成32位的了… -
VCS的simulation语句,要调用C程序的动态库
B.so:仿真语句用simv -sv_lib B,即可完成DPI对C++的调用!注意:simv中
-sv_lib后 不加动态库文件名的后缀…
-
-
部分Reference
vcs中systemverilog和c/c++联合仿真 —— CSDN kevindas;
它讲了 如何“g++生成动态链接库”,并如何用VCS实现 “在SV中用DPI调用动态库.so” 的写法.
3 具体Demo例子【VCS用DPI调用C++】
-
C++内容 ——期望调用的C++程序
// CPP.cpp #includeusing namespace std; extern "C"{ void helloworld_cpp(){ cout<<"Hello world!\n"<
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
C code内容 —— DPI真实调用的内容
// C.c #includevoid helloworld(){ helloworld_cpp(); } - 1
- 2
- 3
- 4
- 5
具体的Makefile Demo(可用!)
// makefile TOP = top_dut.v top_tb.v OPT = -sverilog # if need using SV TIMESCALE = "1ns/1ns" .PHONY: all Clib vcs simv clean all: clean Clib vcs simv Clib: g++ CPP.cpp -m64 -fPIC -shared -o libCPP.so gcc C.c -m64 -fPic -shared -o libC.so -L./ -lCPP #居然不能用libc.so为文件名,母鸡why...那就用libC.so吧 vcs: vcs -full64 -debug_access+all -timescale=${TIMESCALE} ${OPT} ${TOP} -q simv: simv -lca -l simv.log -sv_lib libC clean: rm -rf csrc/ rm -rf simv.daidir/ rm -rf ucli.key vc_hdrs.h simv.* rm -rf libcpp.so libc.so- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
4 用DPI在SV、C/C++间进行数据交互
4.1 基础概念了解
-
大端模式和小端模式——多字节数据内不同字节之间的存放优先顺序,字节内是按“大端”的。
无争议的点:数据都是从低地址往高地址开始放的,只有堆栈式倒着生长的.
大端模式,先存数据的高位部分:即高位在低memory地址,低位在高memory地址;
小端模式,先存数据的低位部分:即低位在低memory地址,高位在高memory地址;
x86、arm常用小端模式,可以默认按小端去算。
-
C/C++的数据存储格式
是用 小端模式 去放数据.
例如:64位数据,占据8个字节;则数据的高位字节的data,再放低位字节的data.
如下方的C程序例子:64位数据 0 x 1000 _ 0000 _ 0000 _ 000 0x1000\_0000\_0000\_000 0x1000_0000_0000_000,其分配的存储空间是 [ 7012080 , 7012087 ] [7012080, 7012087] [7012080,7012087]的8个字节地址空间,但低地址 7012080 7012080 7012080存储的4个字节内容是data的低位部分(全0),高地址 7012084 7012084 7012084存储的4个字节内容是data的高位部分( 0 x 8000 _ 000 0x8000\_000 0x8000_000).
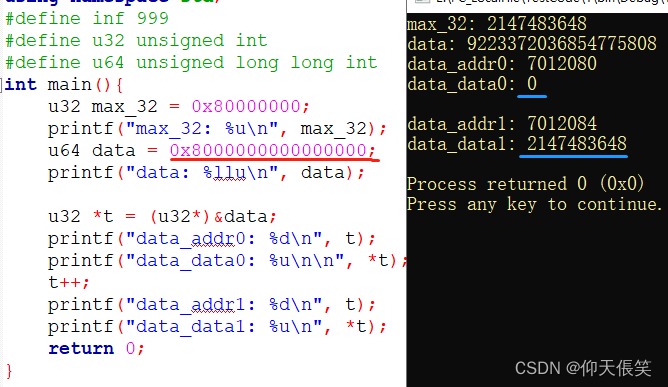
注:要用u32的指针去输出u64内部数据各部分;因为指针+1 增加的地址是此指针对应数据类型宽度. i.e. u32指针+1,地址会增加4字节;u64指针+1,地址就增加了8字节.
4.2 SV与C/C++类型的对应
见绿皮书上的表格,如下:

注意两个问题:
-
SV没有指针;
-
DPI不支持返回复杂的数据类型.
因此,返回复杂的C/C++处理后的结果,不能用返回值,得用 SV的数组 ⇔ \Leftrightarrow ⇔ C的指针! Demo见下面.
4.3 用SV调用DPI 与C/C++交互数据 【Demo】
-
用C++的话,别忘了用C进行封装;详细过程在前文,不赘述.
-
C程序
#include#include "synopsys/vcs/include/svdpi.h" //每个人路径不同,自己在VCS的安装目录下找这个文件的路径 typedef unsigned longlong u64; void getdata( const svBitVecVal *data_in, const svBitVecVal *data_out){ printf("%u\n", *data_in); *data_out = 32; *(data_out+1) = 64; printf("%lld\n", *data_out); // set 64 bit data_out as : // 0x0000_0040_0000_0020 } - 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
-
在SV中写
import "DPI-C" task getdata(input bit[31:0] data_in. output bit[63:0] data_out); module tb; bit [31:0] data_in; bit [63:0] data_out; data_in = 129; getdata(data_in, data_out); $display( $sformatf("the data_in is %u", data_in) ); $display( $sformatf("the data_out is %u %u", data_out[63:32], data_out[31:0]) ); endmodule- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
-
SV需要用动态库的方式调用C,完成DPI的使用,具体过程上文已提,故不赘述.
成功运行~ ( ̄▽ ̄)"!!!
-

一文学会使用Bazel构建C++项目
Flask框架——项目可安装化
大转盘流程
Redis 速度快的原因
《QT+PCL第六章》点云配准icp系列5
C. The Third Problem Codeforces Round #804 (Div. 2)
PHP Session
2. 内核解压-关中断进入svc模式
机器学习——逻辑回归(LR)