-
【slam十四讲第二版】【课后习题】【第九讲~后端1】
【slam十四讲第二版】【课后习题】【第九讲~后端1】
- 0 前言
- 1 课后习题
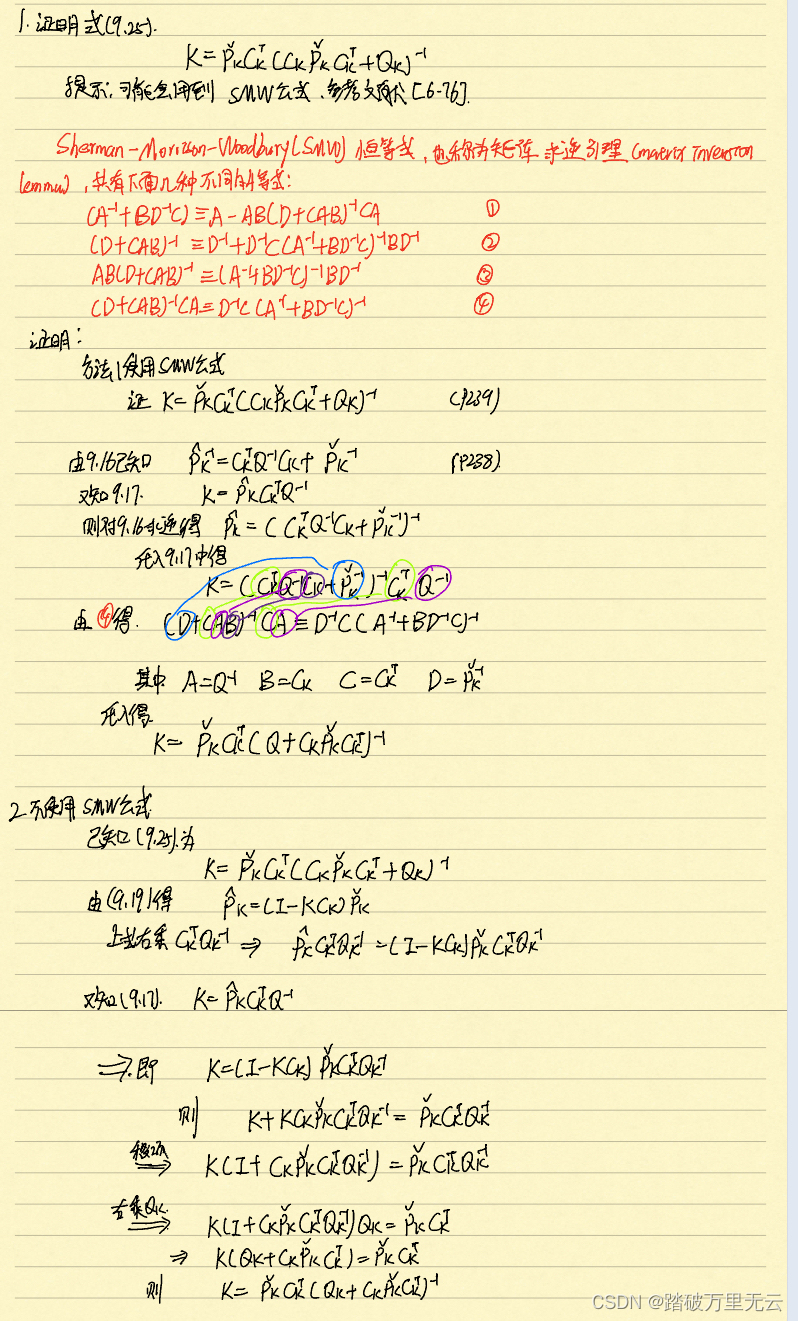
- 1.1 证明(p239 9.25)成立。提示:可能会用到SMW公式,参考文献[6,76]
- 1.2 对比使用g2o和ceres优化后目标函数的数值。指出为什么两者在Meshlab中效果一样但数值不同。
- 1.3 给Ceres当中的部分点云进行Schur消元,看看结果会有什么区别。
- 1.4 证明S矩阵为半正定矩阵
- 1.5 阅读参考文献[36],看看g2o对核函数是如何处理的。与ceres中的Loss function有何联系
- 1.6 在两个示例中,我们优化了相机位姿,以f、k1、k2为参数的相机内参及路标点。请考虑使用第5讲介绍的完整的相机模型进行优化,即、至少考虑fx、fy、p1、p2、k1、k2这些量。修改现在的ceres和g2o程序以完成实验。
0 前言
参考:
1 课后习题
1.1 证明(p239 9.25)成立。提示:可能会用到SMW公式,参考文献[6,76]
1.2 对比使用g2o和ceres优化后目标函数的数值。指出为什么两者在Meshlab中效果一样但数值不同。
- g2o优化后的cost是:
12336.97 - ceres优化后的cost是:
24815.047826
通过对比两组优化后的值,g2o优化后的数值约为Ceres的两倍左右,原因应该是两个优化库计算目标函数优化后数值的方法不一致(即计算用的范数不同);而不严格为2倍的原因与设置的迭代次数或收敛判断条件不同,出于计算成本的考虑并未做过多的迭代。但是两种优化库优化的目标函数是一致的,范数不同只会影响目标函数的数值,而实际待优化的变量的优化结果是一致的,因此最后得到在点云图像一致。
1.3 给Ceres当中的部分点云进行Schur消元,看看结果会有什么区别。
- 整个工程自取链接: https://pan.baidu.com/s/1cuaIyO5mCLTRjLDp7fkNMg 提取码: mj34
1.3.1 ceres_bufen_schur.cpp
1.3.2 CMakeLists.txt
1.3.3 其他文件
1.3.3.1 SnavelyReprojectionError.h
1.3.3.2 common.h
1.3.3.3 common.cpp
1.3.3.4 random.h
1.3.3.5 rotation.h
1.3.4 输出
/home/bupo/my_study/slam14/slam14_my/cap9/ceres_bufen_schur/cmake-build-debug/bundle_adjustment_ceres ./src/problem-16-22106-pre.txt Header: 16 22106 83718bal problem file loaded... bal problem have 16 cameras and 22106 points. Forming 83718 observations. Solving ceres BA ... iter cost cost_change |gradient| |step| tr_ratio tr_radius ls_iter iter_time total_time 0 1.842900e+07 0.00e+00 2.04e+06 0.00e+00 0.00e+00 1.00e+04 0 5.52e-02 1.20e-01 1 1.449093e+06 1.70e+07 1.75e+06 2.16e+03 1.84e+00 3.00e+04 1 2.50e-01 3.70e-01 2 5.848543e+04 1.39e+06 1.30e+06 1.55e+03 1.87e+00 9.00e+04 1 1.95e-01 5.65e-01 3 1.581483e+04 4.27e+04 4.98e+05 4.98e+02 1.29e+00 2.70e+05 1 1.97e-01 7.61e-01 4 1.251823e+04 3.30e+03 4.64e+04 9.96e+01 1.11e+00 8.10e+05 1 1.95e-01 9.57e-01 5 1.240936e+04 1.09e+02 9.78e+03 1.33e+01 1.42e+00 2.43e+06 1 1.97e-01 1.15e+00 6 1.237699e+04 3.24e+01 3.91e+03 5.04e+00 1.70e+00 7.29e+06 1 1.94e-01 1.35e+00 7 1.236187e+04 1.51e+01 1.96e+03 3.40e+00 1.75e+00 2.19e+07 1 1.94e-01 1.54e+00 8 1.235405e+04 7.82e+00 1.03e+03 2.40e+00 1.76e+00 6.56e+07 1 1.95e-01 1.74e+00 9 1.234934e+04 4.71e+00 5.04e+02 1.67e+00 1.87e+00 1.97e+08 1 2.01e-01 1.94e+00 10 1.234610e+04 3.24e+00 4.31e+02 1.15e+00 1.88e+00 5.90e+08 1 1.97e-01 2.13e+00 11 1.234386e+04 2.24e+00 3.27e+02 8.44e-01 1.90e+00 1.77e+09 1 2.00e-01 2.33e+00 12 1.234232e+04 1.54e+00 3.44e+02 6.69e-01 1.82e+00 5.31e+09 1 1.96e-01 2.53e+00 13 1.234126e+04 1.07e+00 2.21e+02 5.45e-01 1.91e+00 1.59e+10 1 1.99e-01 2.73e+00 14 1.234047e+04 7.90e-01 1.12e+02 4.84e-01 1.87e+00 4.78e+10 1 1.98e-01 2.93e+00 15 1.233986e+04 6.07e-01 1.02e+02 4.22e-01 1.95e+00 1.43e+11 1 1.97e-01 3.13e+00 16 1.233934e+04 5.22e-01 1.03e+02 3.82e-01 1.97e+00 4.30e+11 1 1.98e-01 3.32e+00 17 1.233891e+04 4.25e-01 1.07e+02 3.46e-01 1.93e+00 1.29e+12 1 1.99e-01 3.52e+00 18 1.233855e+04 3.59e-01 1.04e+02 3.15e-01 1.96e+00 3.87e+12 1 1.95e-01 3.72e+00 19 1.233825e+04 3.06e-01 9.27e+01 2.88e-01 1.98e+00 1.16e+13 1 1.98e-01 3.92e+00 20 1.233799e+04 2.61e-01 1.17e+02 2.16e-01 1.97e+00 3.49e+13 1 1.98e-01 4.11e+00 21 1.233777e+04 2.18e-01 1.22e+02 1.15e-01 1.97e+00 1.05e+14 1 1.98e-01 4.31e+00 22 1.233760e+04 1.73e-01 1.10e+02 9.16e-02 1.89e+00 3.14e+14 1 1.96e-01 4.51e+00 23 1.233746e+04 1.37e-01 1.14e+02 1.14e-01 1.98e+00 9.41e+14 1 1.98e-01 4.71e+00 24 1.233735e+04 1.13e-01 1.17e+02 2.41e-01 1.96e+00 2.82e+15 1 1.94e-01 4.90e+00 WARNING: Logging before InitGoogleLogging() is written to STDERR W0727 14:10:01.102447 20693 levenberg_marquardt_strategy.cc:115] Linear solver failure. Failed to compute a step: CHOLMOD warning: Matrix not positive definite. 25 1.233735e+04 0.00e+00 1.17e+02 0.00e+00 0.00e+00 1.41e+15 1 1.28e-01 5.03e+00 26 1.233725e+04 9.50e-02 1.20e+02 5.09e-01 1.99e+00 4.24e+15 1 1.94e-01 5.22e+00 W0727 14:10:01.426414 20693 levenberg_marquardt_strategy.cc:115] Linear solver failure. Failed to compute a step: CHOLMOD warning: Matrix not positive definite. 27 1.233725e+04 0.00e+00 1.20e+02 0.00e+00 0.00e+00 2.12e+15 1 1.30e-01 5.35e+00 W0727 14:10:01.550909 20693 levenberg_marquardt_strategy.cc:115] Linear solver failure. Failed to compute a step: CHOLMOD warning: Matrix not positive definite. 28 1.233725e+04 0.00e+00 1.20e+02 0.00e+00 0.00e+00 5.30e+14 1 1.24e-01 5.48e+00 29 1.233718e+04 6.92e-02 5.75e+01 7.39e-02 1.70e+00 1.59e+15 1 1.97e-01 5.67e+00 W0727 14:10:01.873600 20693 levenberg_marquardt_strategy.cc:115] Linear solver failure. Failed to compute a step: CHOLMOD warning: Matrix not positive definite. 30 1.233718e+04 0.00e+00 5.75e+01 0.00e+00 0.00e+00 7.94e+14 1 1.25e-01 5.80e+00 31 1.233714e+04 3.65e-02 5.88e+01 1.11e-01 1.93e+00 2.38e+15 1 1.96e-01 5.99e+00 32 1.233714e+04 0.00e+00 5.88e+01 0.00e+00 0.00e+00 1.19e+15 1 1.25e-01 6.12e+00 W0727 14:10:02.194772 20693 levenberg_marquardt_strategy.cc:115] Linear solver failure. Failed to compute a step: CHOLMOD warning: Matrix not positive definite. 33 1.233714e+04 0.00e+00 5.88e+01 0.00e+00 0.00e+00 2.98e+14 1 1.26e-01 6.25e+00 W0727 14:10:02.320696 20693 levenberg_marquardt_strategy.cc:115] Linear solver failure. Failed to compute a step: CHOLMOD warning: Matrix not positive definite. 34 1.233711e+04 3.32e-02 6.01e+01 4.17e-02 2.00e+00 8.94e+14 1 1.96e-01 6.44e+00 35 1.233708e+04 3.14e-02 6.07e+01 2.72e-01 2.00e+00 2.68e+15 1 1.99e-01 6.64e+00 W0727 14:10:02.843570 20693 levenberg_marquardt_strategy.cc:115] Linear solver failure. Failed to compute a step: CHOLMOD warning: Matrix not positive definite. 36 1.233708e+04 0.00e+00 6.07e+01 0.00e+00 0.00e+00 1.34e+15 1 1.27e-01 6.77e+00 W0727 14:10:02.968645 20693 levenberg_marquardt_strategy.cc:115] Linear solver failure. Failed to compute a step: CHOLMOD warning: Matrix not positive definite. 37 1.233708e+04 0.00e+00 6.07e+01 0.00e+00 0.00e+00 3.35e+14 1 1.25e-01 6.89e+00 38 1.233705e+04 2.50e-02 2.04e+01 7.55e-02 1.68e+00 1.01e+15 1 1.97e-01 7.09e+00 39 1.233704e+04 1.58e-02 2.05e+01 1.69e-01 1.95e+00 3.02e+15 1 1.99e-01 7.29e+00 40 1.233702e+04 1.51e-02 2.08e+01 8.05e-01 2.00e+00 9.05e+15 1 2.00e-01 7.49e+00 41 1.233702e+04 0.00e+00 2.08e+01 0.00e+00 0.00e+00 4.52e+15 1 1.30e-01 7.62e+00 W0727 14:10:03.694670 20693 levenberg_marquardt_strategy.cc:115] Linear solver failure. Failed to compute a step: CHOLMOD warning: Matrix not positive definite. 42 1.233702e+04 0.00e+00 2.08e+01 0.00e+00 0.00e+00 1.13e+15 1 1.26e-01 7.75e+00 W0727 14:10:03.820885 20693 levenberg_marquardt_strategy.cc:115] Linear solver failure. Failed to compute a step: CHOLMOD warning: Matrix not positive definite. 43 1.233701e+04 1.48e-02 2.06e+01 2.04e-01 1.99e+00 3.39e+15 1 1.99e-01 7.94e+00 44 1.233701e+04 0.00e+00 2.06e+01 0.00e+00 0.00e+00 1.70e+15 1 1.28e-01 8.07e+00 W0727 14:10:04.147991 20693 levenberg_marquardt_strategy.cc:115] Linear solver failure. Failed to compute a step: CHOLMOD warning: Matrix not positive definite. 45 1.233700e+04 1.42e-02 2.05e+01 3.37e-01 1.99e+00 5.09e+15 1 1.94e-01 8.27e+00 46 1.233700e+04 0.00e+00 2.05e+01 0.00e+00 0.00e+00 2.54e+15 1 1.26e-01 8.39e+00 W0727 14:10:04.467901 20693 levenberg_marquardt_strategy.cc:115] Linear solver failure. Failed to compute a step: CHOLMOD warning: Matrix not positive definite. W0727 14:10:04.591131 20693 levenberg_marquardt_strategy.cc:115] Linear solver failure. Failed to compute a step: CHOLMOD warning: Matrix not positive definite. 47 1.233700e+04 0.00e+00 2.05e+01 0.00e+00 0.00e+00 6.36e+14 1 1.23e-01 8.52e+00 48 1.233698e+04 1.39e-02 2.10e+01 1.17e-01 2.00e+00 1.91e+15 1 1.91e-01 8.71e+00 49 1.233697e+04 1.36e-02 2.00e+01 1.07e+00 2.00e+00 5.73e+15 1 1.95e-01 8.90e+00 50 1.233697e+04 0.00e+00 2.00e+01 0.00e+00 0.00e+00 2.86e+15 1 1.24e-01 9.03e+00 W0727 14:10:05.101768 20693 levenberg_marquardt_strategy.cc:115] Linear solver failure. Failed to compute a step: CHOLMOD warning: Matrix not positive definite. Solver Summary (v 2.0.0-eigen-(3.3.9)-lapack-suitesparse-(5.1.2)-cxsparse-(3.1.9)-eigensparse-no_openmp) Original Reduced Parameter blocks 22122 22122 Parameters 66462 66462 Residual blocks 83718 83718 Residuals 167436 167436 Minimizer TRUST_REGION Sparse linear algebra library SUITE_SPARSE Trust region strategy LEVENBERG_MARQUARDT Given Used Linear solver SPARSE_SCHUR SPARSE_SCHUR Threads 1 1 Linear solver ordering 11053,11069 11053,11069 Schur structure 2,3,9 2,3,9 Cost: Initial 1.842900e+07 Final 1.233697e+04 Change 1.841667e+07 Minimizer iterations 51 Successful steps 37 Unsuccessful steps 14 Time (in seconds): Preprocessor 0.064353 Residual only evaluation 0.467655 (36) Jacobian & residual evaluation 1.561977 (37) Linear solver 6.502632 (50) Minimizer 8.964540 Postprocessor 0.004606 Total 9.033500 Termination: NO_CONVERGENCE (Maximum number of iterations reached. Number of iterations: 50.) 进程已结束,退出代码0- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
1.3.5 说明
- 从书中256页可以知道在Ceres中无法控制哪部分点云进行Schur消元,因为Ceres进行Schur消元是自动寻找的;只能通过操作ceres::parameterBlockOrdering::AddElementToGroup函数改变Schur消元的顺序,探讨Schur消元的顺序对结果的影响。对代码修改主要增加了如下部分
- 主要是利用ceres::ParameterBlockOrdering改变了Schur消元的顺序,将偶数索引的空间点变量设为优先消元变量,奇数索引的空间点、相机位姿与内参作为次优先级的消元变量。以下是优化后的点云图,与书上图9-13的彩色插图对比,可以看到Schur消元的顺序对点云优化效果基本没有影响。
- 通过下图优化结果的对比,可以发现目标函数优化值也是一致的,这也证明了优化结果的一致性;但是对比优化所用的时间,可以发现指定Schur消元的顺序后使得优化求解的时间增长不少,这是因为我指定的消元顺序是随意的,Ceres通过优化的方式自动指定消元顺序,因此采用自动指定顺序优化时间更短。
1.4 证明S矩阵为半正定矩阵
1.5 阅读参考文献[36],看看g2o对核函数是如何处理的。与ceres中的Loss function有何联系
1.6 在两个示例中,我们优化了相机位姿,以f、k1、k2为参数的相机内参及路标点。请考虑使用第5讲介绍的完整的相机模型进行优化,即、至少考虑fx、fy、p1、p2、k1、k2这些量。修改现在的ceres和g2o程序以完成实验。
- 首先对数据进行修改,从上述的修改可以发现,我们使用的数据集中并没有新增的fy ,p1 ,p2 三个参数,因此我们需要改写数据集,在原先相机模型对应的参数中加入上述三个参数,因为不知道具体的数值fy的数值用fx的代替, p1,p2 均取0。以下是笔者写的数据集修改程序的构造函数部分,基本的思路就是边读边写,不同的地方就是在写入相机参数时,每到第9个参数时,需要在其后面额外写入fy,p1 ,p2 。处理后的数据集命名为problem-16-22106-pre-all.txt
- 代码自取:链接: https://pan.baidu.com/s/1iPLOR0mveRpdySVTdAmrDw 提取码: v3ko
- 下面是ceres的修改
在这里我的已经修改后的自取:链接: https://pan.baidu.com/s/1awdH1WViBB1kH_FOH8OCYw 提取码: rcif - 下面是g2o的修改
在这里我的已经修改后的自取:链接: https://pan.baidu.com/s/1hk26B4gayqNrXCriM1ZQiA 提取码: 0mlt
-
相关阅读:
rank()、row_number()、dense_rank()用法详解
Odoo 15开发手册第九章 外部 API - 集成第三方系统
【数据分析入门】【淘宝电商API接入与电商数据分析】初识Web API(一)
08: value too great for base (error token is “08“)
前端中间件Midway的使用
异步DNS的实现
二叉树前序、中序、后序遍历
广州蓝景—11个ES2022(ES13)中惊人的JavaScript新特性
@Valid与@Validated区别和详细使用及参数注解校验大全
MongoDB的介绍和使用
- 原文地址:https://blog.csdn.net/qq_45954434/article/details/126010257