-
FOC学习笔记-坐标变换以及仿真验证
为什么需要Clarke变换
FOC控制技术,需要转子连续的变化。
- 转子周围有三个相差120°的线圈,若要转子转动,需要用三相的线圈模拟一个旋转的磁场,去拖动这个转子进行旋转,而且是连续的旋转磁场。
- 怎样用三相线圈产生连续的旋转磁场呢?根据电生磁,那么三相线圈里面需要有正弦的交流电流。
- 怎样在线圈中产生正弦的交流电流?则需要给三相线圈通入三相相差120°的正弦电压。有正弦的电压就会产生三相正弦的电流。
为什么不直接用SVPWM产生三相的交流电压通入到线圈里面?
也就是,假如没有坐标变换会怎么样。
电机控制,一般需要控制速度或转矩,二者差不多,控制速度是控制转矩间接控制速度。
怎么去控制电机的转矩?假设现在要提高转矩,就要增加定子正弦电流的幅值,也就需要增加正弦电压的幅值。 现在需要根据指令去动态的控制正弦电压的幅值,一般采用闭环的PID控制,用PID去控制交流的电压幅值和角度信息,因为要对于非线性的信号进行准确控制就要使用复杂的高阶控制器,这对于建模成本、处理器算力、控制实时性等都是不利的。简单地说就是,咱们控制器的反馈输入变量不是三个电流采样值嘛,你要我稳稳地跟踪三个正弦波太麻烦啦!能不能简单点跟踪一条直线(常量)啊?,也就是把三相交流电变换成直流电所以,必须有坐标变换
坐标变换将交流信号,分解成角度信息 θ \theta θ,和幅值信息(Q轴是控制转矩,D轴控制磁场),
Clarke变换和park变换是对电流信号的变换,反变换是对电压信号的变换。
Clarke变换

clarke变换simulink仿真
电压和电流可以直接接起来的原因是因为,现在只是为了验证这个模块,实际的也就是FOC算法里面,电压(Va,Vb,Vc)通入到电机里面,然后电流(Ia,Ib,Ic)是采集回来的电流。


Park变换

park变换simulink仿真
 \
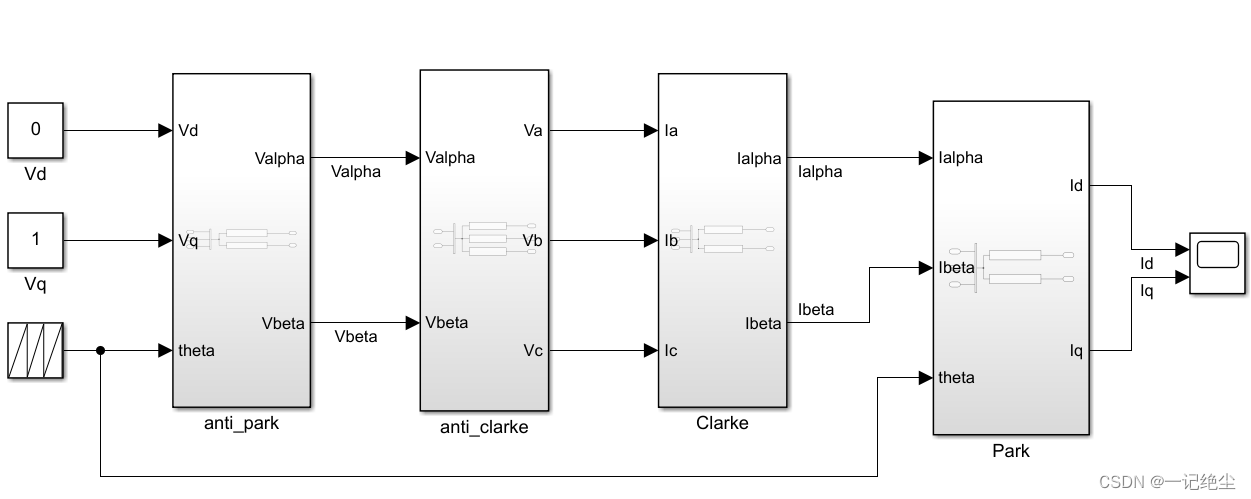
\变换回来的曲线,和最初输入的Vd,Vq一致,说明坐标变换验证成功
反Park变换

反park变换simulink仿真



幅值为1,周期为0.1s,相差90°
反Clarke变换

反clarke变换simulink仿真
反clarke变换的输入,是反park变换的输出


相位差120°
simulink仿真整体图
-
相关阅读:
React之组件定义和事件处理
[附源码]Python计算机毕业设计SSM开放性实验室网上预约管理(程序+LW)
【数据结构与算法】十大经典排序算法
chargpt: 用纯c 写一9*9数独程序
java计算机毕业设计基于安卓Android的校园单车租赁App(源码+系统+mysql数据库+Lw文档)
MIGO行项目屏幕增强
基于yolov5的图像识别
TensorFlow 02(张量)
用队列实现栈-力扣
课堂练习10 python数据库编程
- 原文地址:https://blog.csdn.net/qq_40618919/article/details/125822988