-
并联型模糊PID复合控制器的simulink建模与仿真
1、内容简介
略
402-可以交流、咨询、答疑2、内容说明
在并联型模糊pid 复合控制器设计中,必须根据偏差大小及时地调整模糊控制部分和pid 控制部分的比例,而这种较为复杂的控制策略利 用 普 通 的simulink 模 块 是 很 难 实 现 的 ) 采 用 s 函 数 来 解 决 这个问题,首先基于m 语言编写s 函数以实现模糊控制和pid 控制比例的调整,然后在 simulink仿真环境下调用s 函数程序,从而建立起模糊pid 复合控制系统的仿真模型,该方法仿真模型简单编程容易,可以方便地实现并联结构中 各 部 分 所 占 比 例 随 偏 差 大 小 的 调 整,从 而 能 够 取 得 更 好 的 控 制 效 果 )关键词:模糊控制; pid 控制;simulink ; s 函数随着被控对象的日趋复杂,采用基于 精 确 模 型的传统控制方法往往难以取得令人满意的控制效果 )模糊控制具有不依赖于被控对象的精确数 学模型、动态性能好等优点,目前已在工程实践中得到了极为广泛的应用, 利 用 模 糊 控 制 动 态 性能较好和pid控制稳态性能较好 的 特 点,人 们 设计了各种复合型控制器,并联型 模 糊 pid控 制 器即为其中之一,在并联型模糊pid 控 制 器 中,模 糊 控 制 部 分 和pid 控制部分所起作用大小的比例对于控制器 的性能有着很大影响, 对于这种较为复杂的控制 系统,用普 通 的 simulink 模 块 是 无 法 搭 建 仿 真 模 型的 , 笔者在 介 绍 并 联 型 模 糊 pid 控 制 器 和s函数的基础上,用 m 语言编写s 函数,然 后在 simulink 仿真环境下调用 s函数程序,建立 模糊 pid控制系统的仿真模型,方便 地 实 现 了 随偏差大小两种控制所占比例的调整 )
3、仿真分析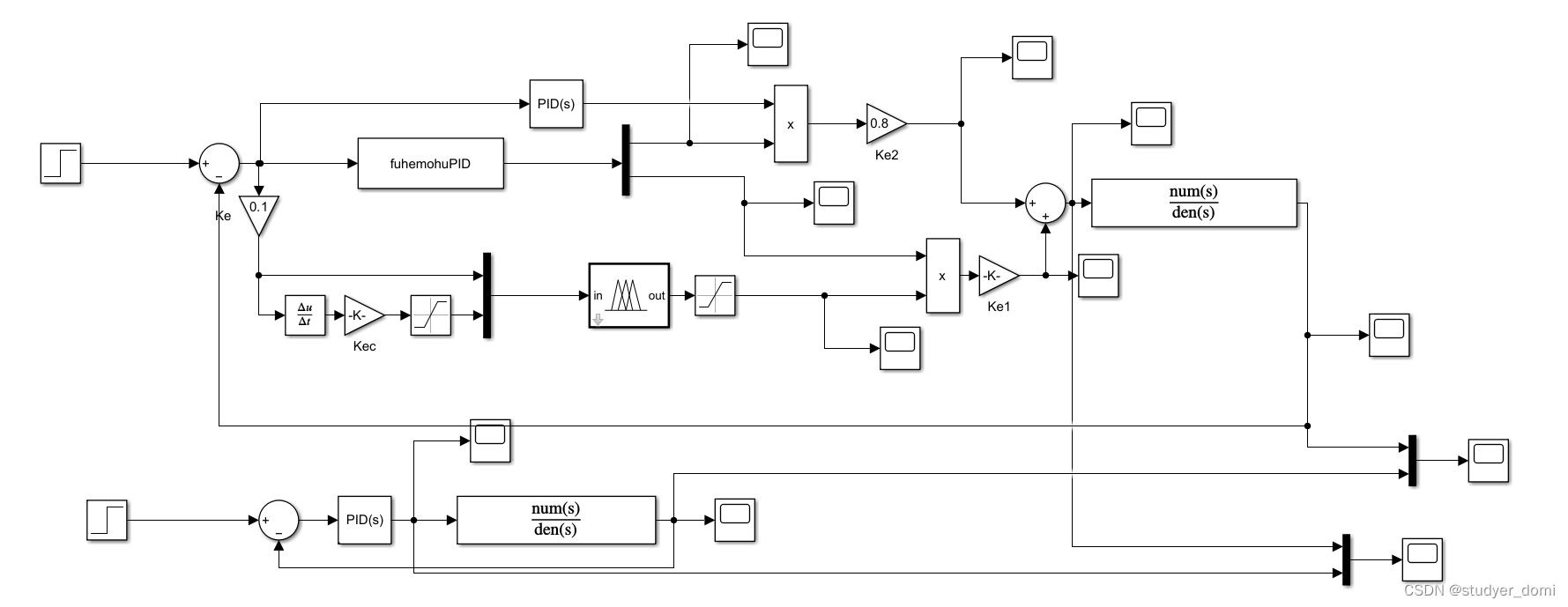
4、参考论文模糊PID控制在水下机器人运动控制中的应用_沈伟
PID复合控制器的Simulink建模与仿真.pdf
-
相关阅读:
J9数字论:DAO组织的组成形式是怎样的?
【析】一类动态车辆路径问题模型和两阶段算法
【Linux学习笔记】调试工具gdb
java和vue的大学生奖学金助学金系统奖学金系统助学金系统
高可用网络规划设计
图的基础知识(数据结构)
深入淺出 Spring Boot 多重設定檔管裡 (Spring Profiles)
C#基础语法--运算符
vue的子组件
QX5241高端检测降压恒流LED驱动器 泉芯电子
- 原文地址:https://blog.csdn.net/qingfengxd1/article/details/125900316