-
Racecar 基于ROS通信机制的多点导航实验
一、实验目的
- 1.进一步了解ROS通信机制;
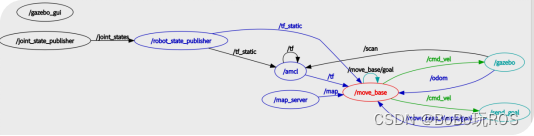
- 2.了解Turtlebot各个节点之间的关系;
- 3.熟悉使用ROS消息类型;
- 4.了解小车闭环控制。
- 5.了解rviz是如何将目标点发送出去的。
二、实验环境
Ubuntu16.04+ROS 。
三、实验原理
发布者订阅者实现,发布者发出目标点,订阅者接受到后控制Turtlebo进行导航。
四、实验内容
- 1.获取rviz发送目标点的topic;
- 2.对已经建好的图获取相应目标点的坐标(多个,即小车要去的目标),还没建图先完成建图;
- 3.查阅资料,编写发布一目标点的python或c脚本;
- 4.编写发布多个目标点的python或c脚本。
五、实验步骤
1.获取rviz发送目标点的topic;

2.对已经建好的图获取相应目标点的坐标(多个,即小车要去的目标),还没建图先完成建图;
打开gazebo roslaunch nav_sim myrobot_world.launch
rosrun teleop_twist_keyboard teleop_twist_keyboard.py
通过移动小车,设置目标点,记录左侧显示的位置坐标。x y z 和分别绕xyz轴旋转的角度:roll pitch yaw3.查阅资料,编写发布一目标点的python或c脚本;
#include#include #include #include using namespace std; int flag=1; class Goal{ public: geometry_msgs::PoseStamped goal; Goal(){ pub=n.advertise<geometry_msgs::PoseStamped>("/move_base_simple/goal",10); sub=n.subscribe("/cmd_vel",1,&Goal::callback,this); goal.header.frame_id = "map"; //改为自己记录目标点的坐标 goal.pose.position.x = pose.x; goal.pose.position.y = pose.y; goal.pose.position.z = pose.z; goal.pose.orientation.x = pose._x; goal.pose.orientation.y = pose._y; goal.pose.orientation.z = pose._z; goal.pose.orientation.w = pose._w; } private: ros::NodeHandle n; ros::Publisher pub; ros::Subscriber sub; void callback(const geometry_msgs::Twist &v); }; void Goal::callback(const geometry_msgs::Twist &v) { if(flag==1&&v.linear.x==0){ ROS_INFO("Sending goal!"); pub.publish(goal); } } int main(int argc,char **argv) { ros::init(argc,argv,"send_goal"); Goal g; ros::spin(); return 0; } - 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
4.编写发布多个目标点的python或c脚本。
#include#include #include #include using namespace std; int flag=1; int g1=0,g2=0,g3=0; class Goal{ public: geometry_msgs::PoseStamped goal_1; geometry_msgs::PoseStamped goal_2; geometry_msgs::PoseStamped goal_3; Goal(){ pub=n.advertise<geometry_msgs::PoseStamped>("/move_base_simple/goal",10); sub=n.subscribe("/cmd_vel",1,&Goal::callback,this); goal_1.header.frame_id = "map"; goal_2.header.frame_id = "map"; goal_3.header.frame_id = "map"; //以下三个目标的改为自己目标点的信息 //Goal one goal_1.pose.position.x = 0.033449; goal_1.pose.position.y = 8.273015; goal_1.pose.position.z = 0.050003; goal_1.pose.orientation.x = 0; goal_1.pose.orientation.y = 0; goal_1.pose.orientation.z = 0; goal_1.pose.orientation.w = 1.487145; //Goal two goal_2.pose.position.x = -0.207746; goal_2.pose.position.y = 17.607371; goal_2.pose.position.z = 0.050003; goal_2.pose.orientation.x = 0; goal_2.pose.orientation.y = 0; goal_2.pose.orientation.z = 0; goal_2.pose.orientation.w = 1.483080; //Goal three goal_3.pose.position.x = 2.467109; goal_3.pose.position.y = 9.938154; goal_3.pose.position.z = 0.050002; goal_3.pose.orientation.x = 0; goal_3.pose.orientation.y = 0; goal_3.pose.orientation.z = 0; goal_3.pose.orientation.w = -1.889479; } private: ros::NodeHandle n; ros::Publisher pub; ros::Subscriber sub; void callback(const geometry_msgs::Twist &v); }; void Goal::callback(const geometry_msgs::Twist &v){ //发送第一个目标点,如果发送成功,v将大于0 if(flag==1&&v.linear.x==0){ ROS_INFO("Sending goal one!"); pub.publish(goal_1); g1=1; } if(v.linear.x>0&&flag==1) flag=2; if(flag==2&&v.linear.x==0&&g1){ ROS_INFO("Sending goal two!"); pub.publish(goal_2); g2=1; } if(v.linear.x>0&&flag==2&&g2) flag=3; if(flag==3&&v.linear.x==0&&g2){ ROS_INFO("Sending goal three!"); pub.publish(goal_3); g3=1; } } int main(int argc,char **argv) { ros::init(argc,argv,"many_goal"); Goal g; ros::spin(); return 0; } - 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
在CMakeLists.txt文件中添加
add_executable(send_goal src/send_goal.cpp) target_link_libraries(send_goal ${catkin_LIBRARIES}) add_executable(many_goal src/many_goal.cpp) target_link_libraries(many_goal ${catkin_LIBRARIES})- 1
- 2
- 3
- 4
在move_base.launch文件中启动send_goal.cpp或many_goal.cpp
加入两行:<!--node pkg="nav_sim" type="send_goal" respawn="false" name="send_goal" output="screen"/--> <node pkg="nav_sim" type="many_goal" respawn="false" name="many_goal" output="screen"/>- 1
- 2
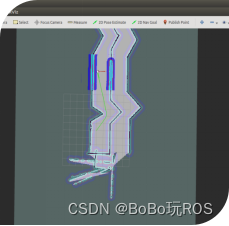
编译成功后:运行
roslaunch nav_sim myrobot_world.launch roslaunch nav_sim move_base.launch- 1
- 2
六、实验数据与结果评价
实验数据:
- 1.目标点数:3个
- 2.目标点位置:
one❌0.033449;y:8.273015;z:0.050003;_x:0;_y:0;_z:0;_w:1.487145;
two❌-0.207764;y:17.607371;z:0.050003;_x:0;_y:0;_z:0;_w:1.483080;
three❌2.467109;y:9.938154;z:0.050002;_x:0;_y:0;_z:0;_w:-1.889479; - 3.坐标系frame_id :map
结果评价:
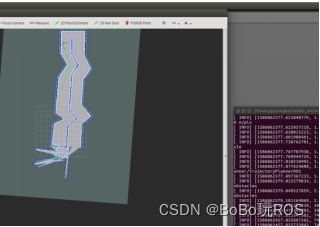
1.脚本能否发送目标点
可以,但需要手动点2D Nav Goal
2.Turtlebot到达一个目标点后能否继续发送第二个目标点
可以

注:也可以不用Turtlebot,使用nav _sim包的小车或者racecar的minicar。
上周的任务:
-
相关阅读:
TensorFlow搭建LSTM实现多变量多步长时间序列预测(一):直接多输出
驱动上下游高效协同,跨境B2B电商平台如何释放LED产业供应链核心价值
K-Means(上):数据分析 | 数据挖掘 | 十大算法之一
《安富莱嵌入式周报》第324期:单对以太网技术实战,IROS2023迪士尼逼真机器人展示,数百万模具CAD文件下载,闭环步进电机驱动器,CANopen全解析
基础的C语言编程题,喊你快来巩固一下
Redis - 10、主从复制
Java-Day19 Java集合(集合框架、Collection接口、List接口及List接口实现类)
LeetCode 热题 100(九):回溯复习。77. 组合、17. 电话号码的字母组合、39. 组合总和
二叉搜索树之:【中序遍历一棵二叉搜索树】【给一棵有固定形态的二叉搜索树填值】【用BST中序遍历的性质填值】【之前讲过层序遍历】
防火墙软件 iptables
- 原文地址:https://blog.csdn.net/gezongbo/article/details/125361191


