-
【相机标定&基于消失点的外参标定】
关于相机外参动态标定的资料,记录参考。
文章一:Camera calibration using two or three vanishing points
:基于消失点的相机自标定
文章下载链接:译文:链接: https://cloud.tencent.com/developer/article/1762245
基本内容:
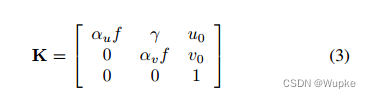
计算内参:
基于世界坐标系下的坐标轴平行线,找到图像坐标系下对应的消失点,假设了图像的主点位于图像的中心位置,并假设两个像轴之间的倾斜角,为 γ =0,纵横比为1,即αu=αv=f,简化了相机的内参。依据空间几何关系(垂直-勾股定理),求解相机内参:图像中心点(u0,v0),焦距F。
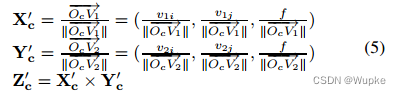
计算外参:设定消失点在图像平面上的坐标是V1=(v1i,v1j)和V2=(v2i,v2j),依据消失点与光心连线的性质:
消失点与光心的连线,平行于形成该消失点平面的平行线。所以在空间中互相垂直的几组平行线,对应的消失点与相机光心的连线也互相垂直。构建了一个新的坐标系,其坐标原点是相机坐标系的原点Oc,与世界系统具有相同的方向。因此,新坐标系和相机坐标系之间的旋转与世界坐标系和相机坐标系之间的旋转相同。向量X′c,Yc′,Z′c为:
最终的旋转矩阵R可得: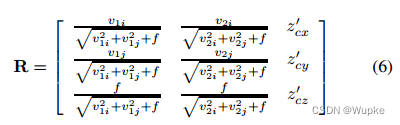
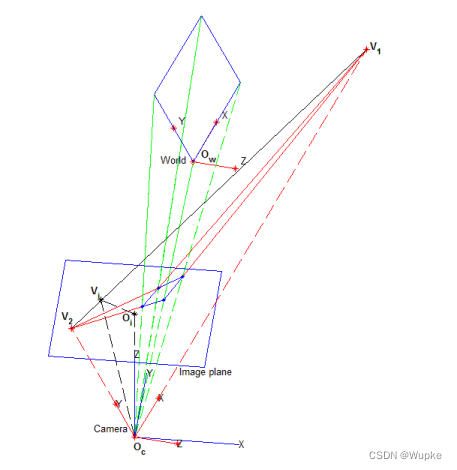
求解平移向量的过程中,运用平行线段的平移,和坐标的转化,构建一个相似三角形: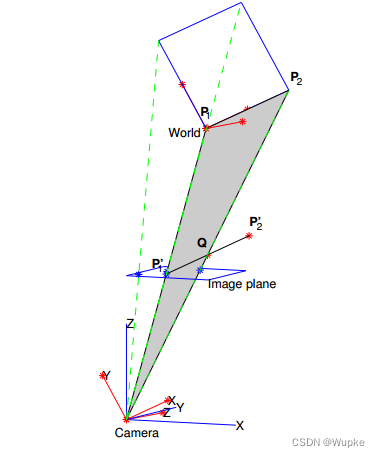
假设已知场景中已知长度的一小段,其两个端点中的第一个位于世界原点。在不失概括性的情况下,世界的中心可以在场景中的任何一点上选择。线段由世界点P1=[0,0,0]T和P2=[xp2,yp2,zp2]T确定,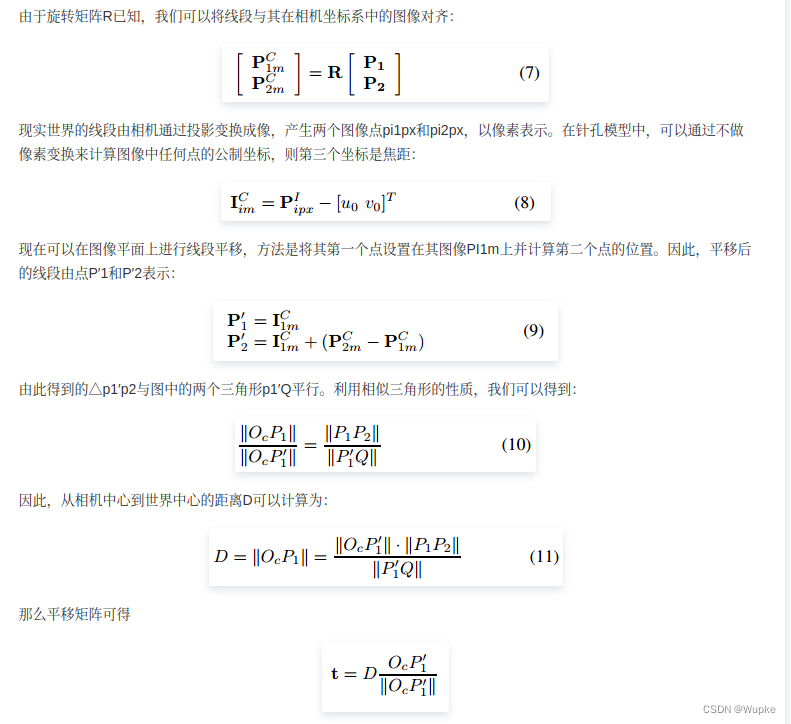
文章二:Online Extrinsic Camera Calibration for Temporally Consistent IPM Using Lane Boundary Observations with a Lane Width Prior
:基于车道宽度先验的车道边界观测的时间一致 IPM 在线外部相机校准
文章下载链接:
链接: https://arxiv.org/pdf/2008.03722.pdf
译文:链接: http://www.360doc.com/content/21/0616/08/74116089_982234148.shtml基本内容:
提出了一种对相机的在线外参标定的方法,即在连续的驾驶场景图像中,从路面信息估计俯仰角、偏航角、横滚角和摄像机高度。该方法分两步估计相机的外部参数:
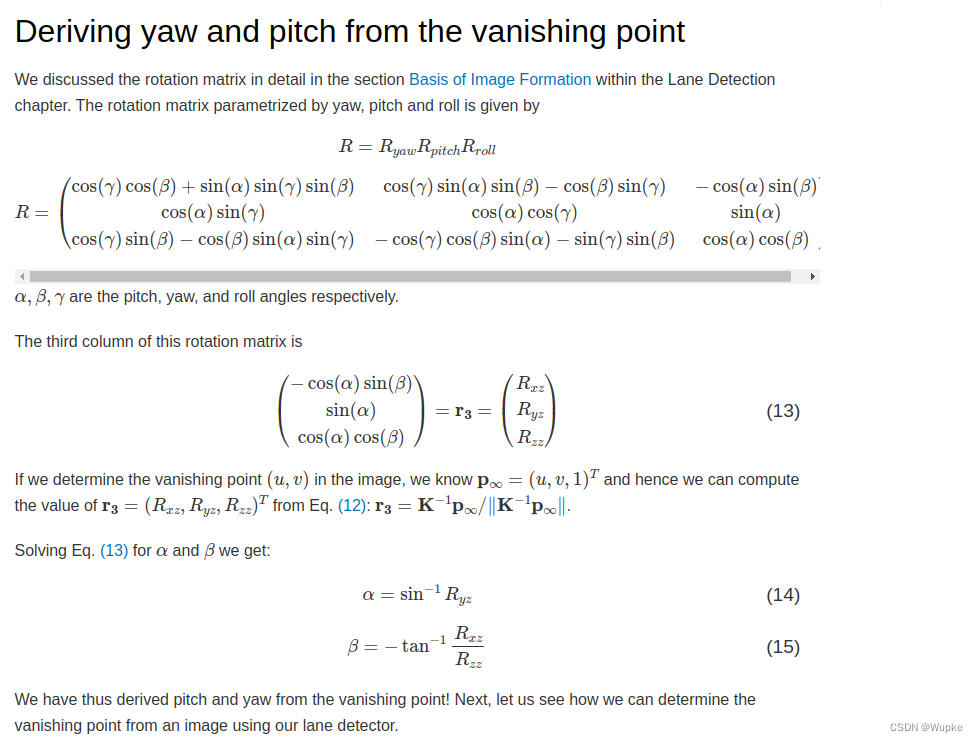
1)利用一组车道线观测值计算的消失点同时估计俯仰角和偏航角;
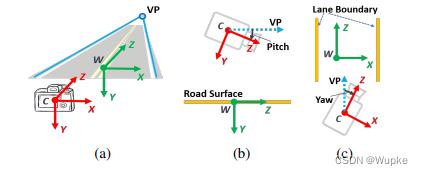
2)通过最小化车道宽度观测值和车道宽度先验值之间的差异来计算横滚角和摄像机高度。利用扩展卡尔曼滤波(EKF)对摄像机外部参数进行连续更新。
- 由求出的三个角度参数、相机的高度信息,计算外参,假设内参是已知的:
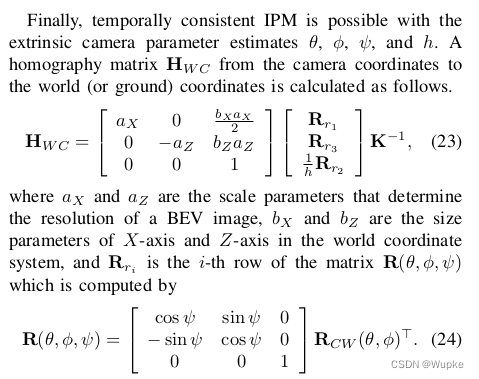
3)最后利用逆透视映射(IPM)生成时间一致的鸟瞰图(BEV)。

文章三:Extrinsic Camera Calibration
链接: Extrinsic Camera Calibration
与文章二很贴合。

-
相关阅读:
手把手入门Node框架Egg.js
Dijkstra算法略解
在vue2.x里面简单使用socketio
Spring Data Rest远程命令执行漏洞复现(CVE-2017-8046)
低代码选型应该注重哪些方面的能力?
QT&C++ day12
信息系统项目管理-项目采购管理-十二
长沙游总体计划(详细各点周末补充)
【PX4学习笔记】06.PID控制原理
linux环境openjdk使用arthas
- 原文地址:https://blog.csdn.net/Kefenggewu_/article/details/125537080