-
机器视觉系统的配件及工作过程
机器视觉系统分别有以下配件组成:
1.相机:黑白智能相机、线扫描智能相机、彩色智能相机、CMOS智能相机、读码器等;
2.板 卡:黑白图像采集卡、图象压缩/解压板卡、彩色采集卡、1394接口板卡、图象处理板卡等;
3.软 件 包:图象处理软件、机器视觉工具软件;
4.工业相机:cmos相机、ccd彩色相机、面阵相机、CAMERA-LINK相机、行扫描相机、红外相机、高速相机、1394接口相机;
5.工业镜头:相机镜头、放大镜、高分辨率镜头、图象扫描镜头、聚光透镜、望远镜、摄象机镜头
6.光源:led光源、氙气照明系统、紫外照明系统、红外光源、光纤照明系统、荧光照明系统;
7.辅助产品:标定块、光栅、围圈、连线及连接器、电源、底板;
8.图象处理系统:光学文字、识别系统、自动化/机器人技术、红外图象系统;
9.光学系统:显微镜、激光扫描仪、电子视频内窥镜、工业内窥镜;
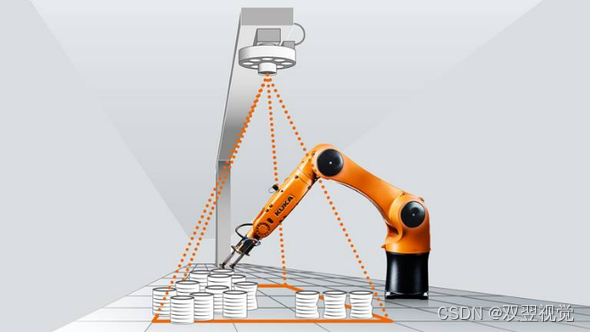
机器视觉系统工作过程:1、工件定位检测器探测到物体已经运动至接近摄像系统的视野中心,向图像采集部分发送触发脉冲。
2、图像采集部分按照事先设定的程序和延时,分别向摄像机和照明系统发出启动脉冲。
3、摄像机停止目前的扫描,重新开始新的一帧扫描,或者摄像机在启动脉冲来到之前处于等待状态,启动脉冲到来后启动一帧扫描。
4、摄像机开始新的一帧扫描之前打开曝光机构,曝光时间可以事先设定。
5、另一个启动脉冲打开灯光照明,灯光的开启时间应该与摄像机的曝光时间匹配。
6、摄像机曝光后,正式开始一帧图像的扫描和输出。
7、图像采集部分接收模拟视频信号通过A/D将其数字化,或者是直接接收摄像机数字化后的数字视频数据。
8、图像采集部分将数字图像存放在处理器或计算机的内存中。
9、处理器对图像进行处理、分析、识别,获得测量结果或逻辑控制值。
10、处理结果控制流水线的动作、进行定位、纠正运动的误差等。
-
相关阅读:
GoogLeNet网络详解
Ubuntu22.0.4安装svn服务
kali终端查看图形类数据
Cpolar内网穿透工具在windows和Linux上具体使用
Python 自动化: eip、cen监控数据对接到 grafana
2022乐鑫数字芯片提前批笔试
ES6 入门教程 26 编程风格 26.7 Map 结构 & 26.8 Class & 26.9 模块 & 26.10 ESLint 的使用
【Hive】分区表和分桶表相关知识点介绍
Linux安装java的JDK步骤
性能测试必备技能:Prometheus监控平台搭建
- 原文地址:https://blog.csdn.net/weixin_51554164/article/details/125483496