-
卡尔曼滤波器的推导
参考资源
【卡尔曼滤波器】1_递归算法_Recursive Processing_哔哩哔哩_bilibili
【卡尔曼滤波器】2_数学基础_数据融合_协方差矩阵_状态空间方程_观测器问题_哔哩哔哩_bilibili
【卡尔曼滤波器】3_卡尔曼增益超详细数学推导 ~全网最完整_哔哩哔哩_bilibili
【卡尔曼滤波器】4_误差协方差矩阵数学推导_卡尔曼滤波器的五个公式_哔哩哔哩_bilibili
【卡尔曼滤波器】5_直观理解与二维实例【包含完整的EXCEL代码】_哔哩哔哩_bilibili
说明
我是跟着DR_CAN老师几篇视频的讲解,自己推导了一遍,加深理解,也方便查阅。老师讲得很好。
Kalman filter is an optimal recursive data processing algorithm.
卡尔曼滤波器是一个最优的、递归的数据处理算法,可以对输入数据进行时间递归处理。它是一个线性滤波器。
数据预测具有不确定性,数据测量也有不确定性,卡尔曼滤波是根据不那么准确的预测模型、和不那么准确的观测,来拟合出一个最优值。
递归算法
假设用一把尺子对一个物体进行测量,测了k次,测量值分别是
 现在求估计值。
现在求估计值。测量了k次的估计值为:


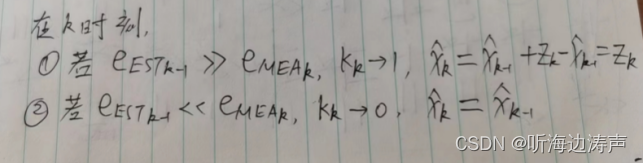
上式表达的意思是:
当前的估计值 = 上次的估计值 + 系数 *(当前的测量值 – 上次的估计值)
在卡尔曼滤波器中,
 是卡尔曼增益(Kalman Gain)。
是卡尔曼增益(Kalman Gain)。定义估计误差和测量误差:
估计误差
 :代表估计值和真实值的差距
:代表估计值和真实值的差距测量误差
 :代表测量值和真实值的差距
:代表测量值和真实值的差距

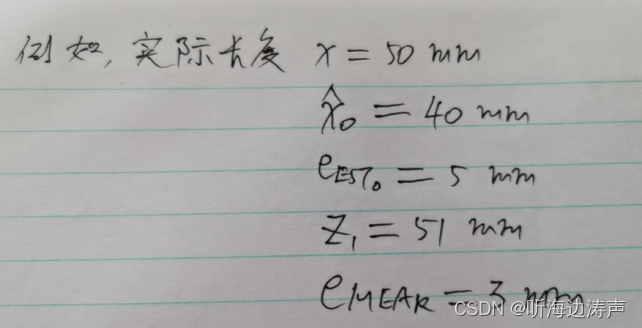
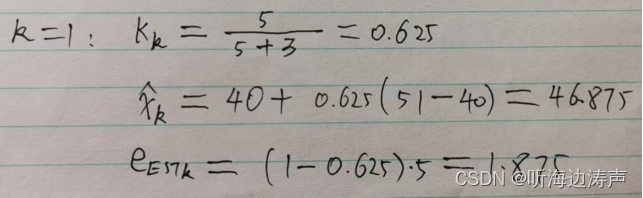
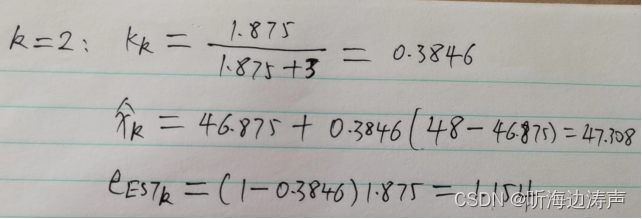
手工计算前面几次:


用excel计算:

根据excel计算结果画的图:

数学基础:数据融合、协方差矩阵、状态空间方程
数据融合
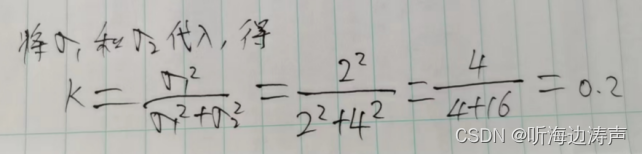
例如用两个称称一个物体,两个称都不准。







协方差矩阵
协方差矩阵,将方差、协方差在一个矩阵中表现出来,体现了变量间的联动关系。
例子:
球员
身高x(厘米)
体重y(公斤)
年龄z
哈兰德
194
87
23
孙兴憨
183
78
31
萨拉赫
175
71
31
平均
184
78.7
28.3



协方差:
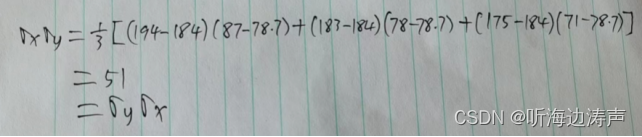

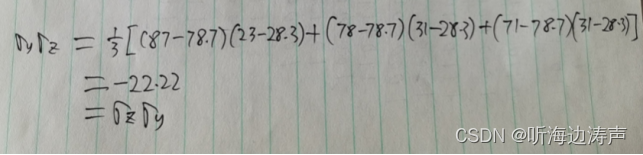
协方差矩阵:
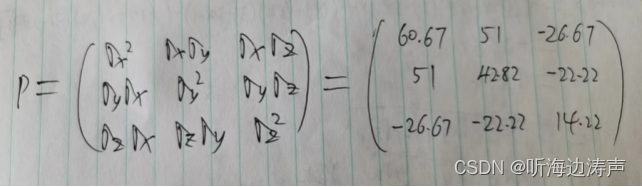
定义矩阵:

则,协方差矩阵:

更多球员的数据:
球员
身高x(厘米)
体重y(公斤)
年龄z
哈兰德
194
87
23
孙兴憨
183
78
31
萨拉赫
175
71
31
因莫比莱
184
78
33
伊瓜因
184
72
36
莫拉塔
189
85
31
贝林厄姆
186
81
20
莱万多夫斯基
185
81
34
求出的协方差矩阵是:
身高
体重
年龄
身高
25.5
23.5
-11.25
体重
23.5
27.86
-14.48
年龄
-11.25
-14.48
26.61
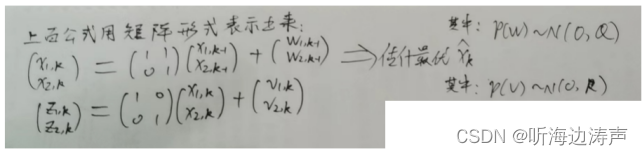
状态空间表达

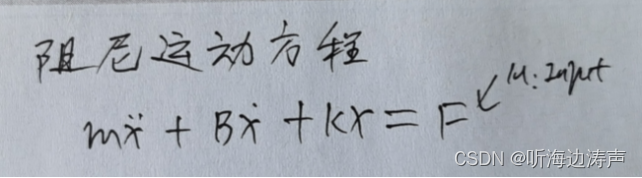


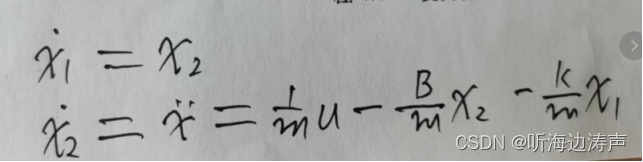

将上面四个方程,用矩阵形式表示出来,作为状态空间方程:




卡尔曼增益的数学推导

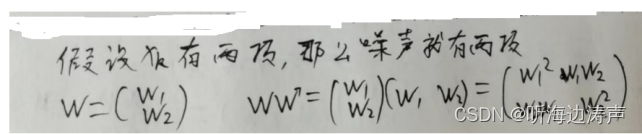
假设噪声符合正态分布:


其中上式中E表示期望。
下面证明:


如果X的期望为0,即E(X)=0,那么

因为假设噪声符合期望为0的高斯分布,所以:










定义后验估计误差
 :
:

下面计算协方差矩阵P:




进一步提取:
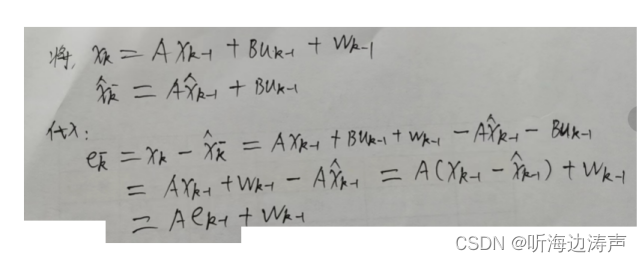
定义先验估计误差
 :
:
可得:

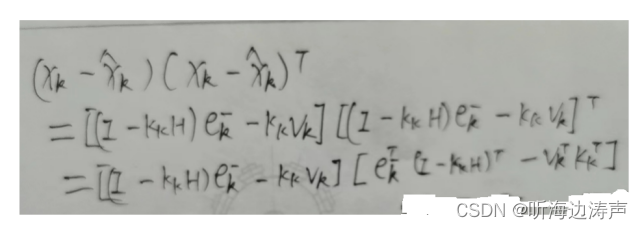









得到后验估计误差的协方差矩阵:

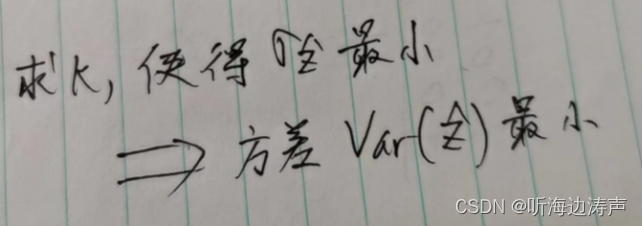
目标是使后验估计误差协方差矩阵
 的迹(trace)最小。的迹:
的迹(trace)最小。的迹:


因为一个矩阵和它的转置矩阵的迹相同,所以:














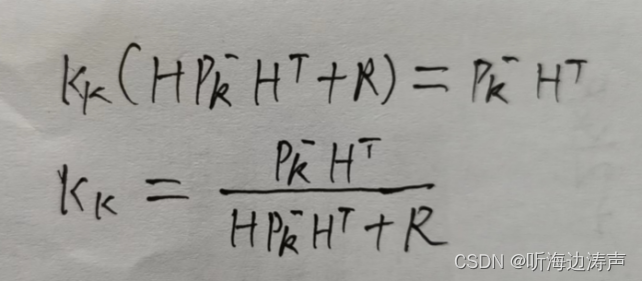
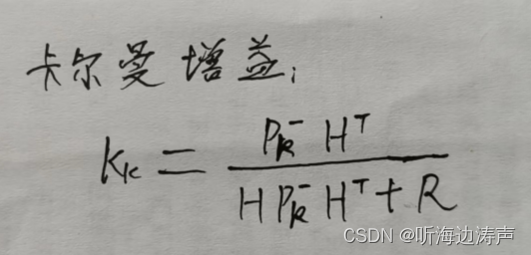
上式就是卡尔曼增益的公式,是卡尔曼滤波中的一个核心公式。
其中R是测量误差的协方差矩阵。
当R很大的时候,即测量误差很大的时候,

由上面的公式:

可知,此时的后验估计值等于先验估计:
当R很小,即测量误差很小的时候:

此时的估计值等于测量值:

误差协方差矩阵











卡尔曼滤波器的5个公式:


在卡尔曼增益公式推导过程中,我们已经得出:


通过一个二维实例直观理解卡尔曼滤波器
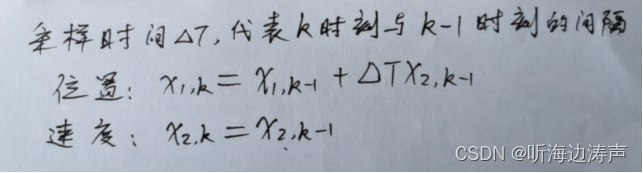
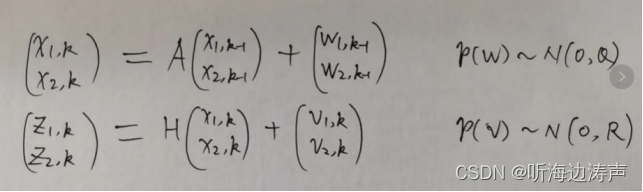
考虑一个人走路,假设匀速行驶。分别设定两个状态变量:
 :表示位置
:表示位置 :表示速度
:表示速度
此时,速度和位置状态方程变为:


因为加上了不确定性,所以就无法直接通过上面两个式子求出k时刻的位置、速度。但是可以估计,根据噪声的误差来估计。


卡尔曼滤波器分两个步骤:预测和校正:

用excel计算:



为了简化起见,设Q矩阵、R矩阵的协方差项为0,即各误差项之间是相互独立的。所以Q矩阵和R矩阵只有对角线上的值不等于0。矩阵的值自己可以修改



-
相关阅读:
【Mybatis】万能的map
【POJ No. 3067】 公路交叉数 Japan
性能分析优化的道与术
Hadoop搭建
【GAN对抗性损失函数】以CycleGAN和PIX2PIX算法的对抗性损失的代码为例进行讲解
HTML动态彩虹字
DC-DC——同步和异步的区别
Android Studio IDE安装指南
MySQL5.5.28版本的安装与配置完整版
行高的继承和消除内外边距
- 原文地址:https://blog.csdn.net/panghuangang/article/details/134529501