-
基于FPGA的图像RGB转HLS实现,包含testbench和MATLAB辅助验证程序
目录
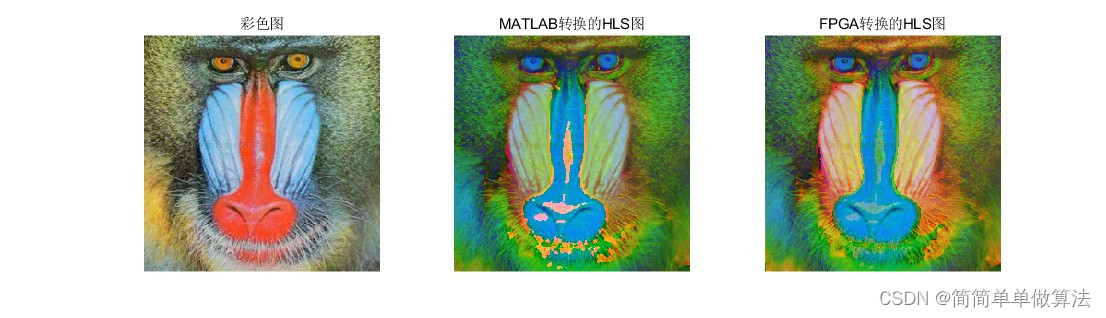
1.算法运行效果图预览

将FPGA结果导入到MATLAB显示效果:
2.算法运行软件版本
Vivado2019.2
matlab2022a
3.部分核心程序
- `timescale 1ns / 1ps
- //
- // Company:
- // Engineer:
- //
- // Create Date: 2023/08/01
- // Design Name:
- // Module Name: RGB2gray
- // Project Name:
- // Target Devices:
- // Tool Versions:
- // Description:
- //
- // Dependencies:
- //
- // Revision:
- // Revision 0.01 - File Created
- // Additional Comments:
- //
- //
- module test_image;
- reg i_clk;
- reg i_rst;
- reg [7:0] Rbuff [0:100000];
- reg [7:0] Gbuff [0:100000];
- reg [7:0] Bbuff [0:100000];
- reg [7:0] i_Ir,i_Ig,i_Ib;
- wire [7:0] o_H;
- wire [7:0] o_L,o_S;
- integer fids1,dat1,fids2,dat2,fids3,dat3,jj=0;
- //D:\FPGA_Proj\FPGAtest\codepz
- initial
- begin
- fids1 = $fopen("D:\\FPGA_Proj\\FPGAtest\\codepz\\R.bmp","rb");
- dat1 = $fread(Rbuff,fids1);
- $fclose(fids1);
- end
- initial
- begin
- fids2 = $fopen("D:\\FPGA_Proj\\FPGAtest\\codepz\\G.bmp","rb");
- dat2 = $fread(Gbuff,fids2);
- $fclose(fids2);
- end
- initial
- begin
- fids3 = $fopen("D:\\FPGA_Proj\\FPGAtest\\codepz\\B.bmp","rb");
- dat3 = $fread(Bbuff,fids3);
- $fclose(fids3);
- end
- initial
- begin
- i_clk=1;
- i_rst=1;
- #1200;
- i_rst=0;
- end
- always #5 i_clk=~i_clk;
- always@(posedge i_clk)
- begin
- i_Ir<=Rbuff[jj];
- i_Ig<=Gbuff[jj];
- i_Ib<=Bbuff[jj];
- jj<=jj+1;
- end
- main_RGB2HLS main_RGB2HLS_u(
- .i_clk (i_clk),
- .i_rst (i_rst),
- .i_image_R (i_Ir),
- .i_image_G (i_Ig),
- .i_image_B (i_Ib),
- .o_H (o_H),// Y
- .o_L (o_L),// Y
- .o_S (o_S)
- );
- integer fout1;
- initial begin
- fout1 = $fopen("H.txt","w");
- end
- always @ (posedge i_clk)
- begin
- if(jj<=66616)
- $fwrite(fout1,"%d\n",o_H);
- else
- $fwrite(fout1,"%d\n",0);
- end
- integer fout2;
- initial begin
- fout2 = $fopen("L.txt","w");
- end
- always @ (posedge i_clk)
- begin
- if(jj<=66616)
- $fwrite(fout2,"%d\n",o_L);
- else
- $fwrite(fout2,"%d\n",0);
- end
- integer fout3;
- initial begin
- fout3 = $fopen("S.txt","w");
- end
- always @ (posedge i_clk)
- begin
- if(jj<=66616)
- $fwrite(fout3,"%d\n",o_S);
- else
- $fwrite(fout3,"%d\n",0);
- end
- endmodule
- 0X_023m
4.算法理论概述
在数字图像处理中,RGB和HLS是两种常见的颜色空间。RGB基于红绿蓝三种基本颜色的叠加来定义其他颜色,而HLS则代表色调、亮度和饱和度,它更接近人类视觉对颜色的感知。将RGB图像转换为HLS图像的目的通常是为了更方便地进行某些类型的图像处理,比如色彩平衡和色彩分离。RGB颜色空间基于笛卡尔坐标系,其中R、G、B分别代表红、绿、蓝三种颜色的强度。HLS颜色空间则是基于圆柱坐标系,其中H代表色调(0-360度),L代表亮度(0-1),S代表饱和度(0-1)。
转换的第一步是将RGB值归一化到[0,1]范围。然后,通过计算RGB颜色空间的最大值和最小值来得到亮度L。色调H由RGB中的最大值和最小值决定,并使用反正切函数来得到0-360度的角度。最后,饱和度S基于最大值和亮度L来计算。
具体的转换公式如下:
将RGB值归一化到[0,1]:
R' = R/255
G' = G/255
B' = B/2554.1计算最大值和最小值
Max = max(R', G', B')
Min = min(R', G', B')
Diff = Max - Min4.2计算亮度L
L = (Max + Min) / 2
4.3计算饱和度Sif L < 0.5:
S = Diff / (Max + Min)
else:
S = Diff / (2 - Max - Min)4.4计算色调H
if Diff == 0:
H = 0
else:
if Max == R':
H = (60 * ((G' - B') / Diff) + 360) % 360
elif Max == G':
H = (60 * ((B' - R') / Diff) + 120) % 360
elif Max == B':
H = (60 * ((R' - G') / Diff) + 240) % 360这些公式可以将每一个像素从RGB颜色空间转换到HLS颜色空间。值得注意的是,这种转换通常是可逆的,也就是说,你也可以从HLS颜色空间转换回RGB颜色空间。在实现RGB到HLS的转换时,通常会先读取一幅RGB图像,然后将上述公式应用于图像中的每一个像素。
5.算法完整程序工程
OOOOO
OOO
O
-
相关阅读:
OpenCV透视变换——将斜方向的图片转成正方向鸟瞰图
存储性能测试
java 遍历文件夹目录树形结构并在控制台输出且保存到本地文件
react数据管理之setState与Props
WebAssembly核心编程[3]: Module 与 Instance
6.【图的应用2】有向⽆环图DAG描述表达式、拓扑排序和逆拓扑排序(AOV网)、关键路径(AOE网)
七、定时器类的编写与解析 —— TinyWebServer
C++入门应该注意的问题(this指针和类对象)
源码包部署
Spring Cloud Stream详解
- 原文地址:https://blog.csdn.net/aycd1234/article/details/134396332