-
自动驾驶算法(九):多项式轨迹与Minimun Snap原理与Matab代码详解
目录
1 为什么需要轨迹优化
我们利用前八篇所学的博客可以利用RRT、A*、遗传算法等设计出一条折线轨迹,轨迹优化就是在路径优化的基础上将折线优化成曲线,这样更加有利于无人机的飞行。

那么什么是多项式轨迹呢?

每段轨迹的路程以t为变量的函数表示出来就是多项式轨迹。
我们用三段轨迹表示这段路程(以时间t作为自变量):

那么我们的任务就是求解参数向量p确定轨迹,
 与路程成正比的因此我们可以提前算出。
与路程成正比的因此我们可以提前算出。那么我们轨迹的要求是什么呢?

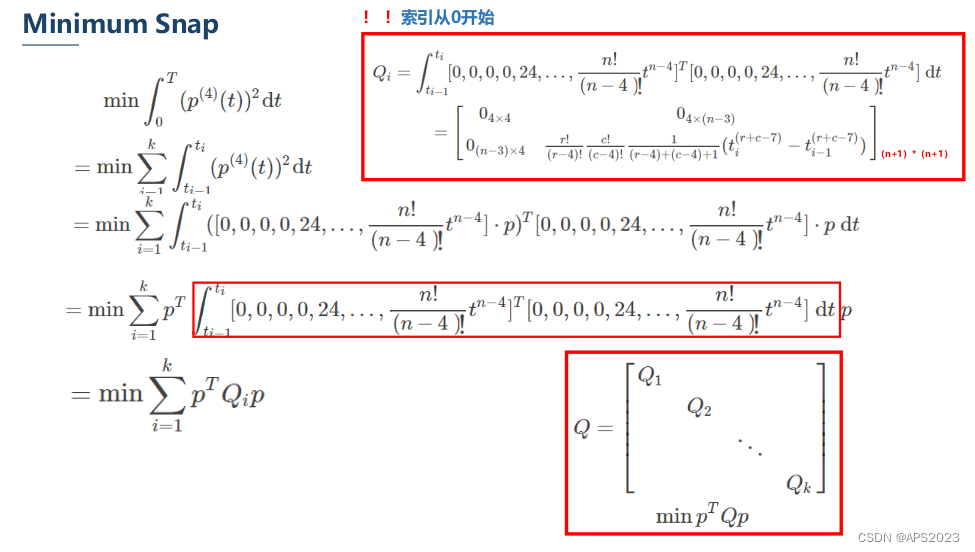
优化目标为:

这个优化的目的是使加速度尽可能的小:那么速度也是尽可能地小,对无人机动力要求就不那么大了。
具体推导如下:
其实我们就要算出来个Q矩阵,里面的r是rows的意思,c是cols的意思。


其实就是一个二次规划问题?

也就是求在Ap=b约束下最小的
 。
。2 代码解析
我们先来运行一下:

所在位置为*的就是我们航行的路径点,不同颜色的就是几段。
我们因此要先设置起点的速度和加速度、终点的速度和加速度、还有总时间、我们根据总时间还有路径的长度去分配时间:
- function demo1_minimum_snap_simple()
- clear,clc;
- % condition
- % 航路点 起点、终点、中间的这些点
- waypts = [0,0;
- 1,2;
- 2,0;
- 4,5;
- 5,2]';
- % 起点、终点速度加速度
- v0 = [0,0];
- a0 = [0,0];
- v1 = [0,0];
- a1 = [0,0];
- % 总时间
- T = 5;
- % 计算每一段轨迹的时间
- % 输入参数为航路点 + 总时间
- ts = arrangeT(waypts,T);
- % 设置多项式的阶数
- n_order = 5;
我们看一下怎么给各段路程分配时间的:
- function ts = arrangeT(waypts,T)
- % 这一行代码计算了相邻路径点之间的差值。假设 waypts 是一个矩阵,每一列代表一个路径点的坐标,
- % 那么 waypts(:,2:end) 选择了除了第一个路径点之外的所有路径点,waypts(:,1:end-1) 选择了除了最后一个路径点之外的所有路径点,
- % 然后两者相减,得到了相邻路径点之间的位移。
- % waypts:
- % 0 1 2 4 5
- % 0 2 0 5 2
- % waypts(:,2:end)
- % 冒号表示取到了所有的行,取到了2到最后一列
- % 1 2 4 5
- % 2 0 5 2
- % 0 1 2 4 = 1 1 2 1
- % 0 2 0 5 = 2 -2 5 -3 其实就是相邻的点进行相减
- x = waypts(:,2:end) - waypts(:,1:end-1);
- % 计算了相邻路径点之间的欧几里得距离。x.^2 将 x 中的每个元素平方,然后 sum(x.^2,1) 对每列进行求和,
- % 最后 .^0.5 对每个和取平方根,得到相邻路径点之间的欧几里得距离。
- dist = sum(x.^2,1).^0.5;
- % 计算了一个缩放因子 k,它是总时间 T 与所有相邻路径点之间的距离之和的比值。
- k = T/sum(dist);
- % 构建了时间戳 ts。cumsum(dist*k) 计算了距离的累积和,然后在前面加了一个零,以确保起始时间戳为零。
- ts = [0 cumsum(dist*k)];
- end
我们指定了总时间T=5秒,这里做的就是根据路程进行线性分段。
- %% XY轴分开计算
- % 传入参数 第一行的所有列就是所有的x 每一段的时间 多项式阶 起点终点的加速度
- polys_x = minimum_snap_single_axis_simple(waypts(1,:),ts,n_order,v0(1),a0(1),v1(1),a1(1));
- polys_y = minimum_snap_single_axis_simple(waypts(2,:),ts,n_order,v0(2),a0(2),v1(2),a1(2));
这里就是重头戏了,进行路径规划,包括求Q矩阵与约束的构建。
- % 传入参数 第一行的所有列就是所有的x 每一段的时间 多项式阶 起点终点的加速度
- function polys = minimum_snap_single_axis_simple(waypts,ts,n_order,v0,a0,ve,ae)
- % 起点终点的位置
- p0 = waypts(1);
- pe = waypts(end);
- % 多项式的段数:航路点-1
- n_poly = length(waypts)-1;
- % 参数个数 = 阶数+1
- n_coef = n_order+1;
- % 构建优化目标 优化目标的数量为多项式的段数
- Q_all = [];
- for i=1:n_poly
- % 构建对角矩阵(有几个多项式就有几个Q)
- % 在每次循环中,它调用了一个名为 computeQ 的函数
- % 传递了四个参数:n_order(多项式的阶数)、3(对jack 4阶导数进行优化)、ts(i)这一段的起始时间 和 ts(i+1)这一段的结束时间。
- % computeQ 函数的返回值是一个对角矩阵,这个对角矩阵将会被加入到 Q_all 中,通过 blkdiag 函数实现对 Q_all 的更新。
- Q_all = blkdiag(Q_all,computeQ(n_order,3,ts(i),ts(i+1)));
这里我们传进来了起点和终点的x坐标。n_poly表示多项式的段数,也就是我们求的路程有几段,为航路点个数-1 = 4段。n_coef就是p矩阵的阶数,我们采用5阶(n_order)项+一个常数项的表示方法,即:
% 传入参数 个体的路径 地图 一行有多少个元素x
% 它告诉 MATLAB 这是一个名为 generate_continuous_path 的函数,它接受三个输入参数 single_pop,G 和 x,并且它会返回一个名为 single_new_pop 的变量。
function [single_new_pop] = generate_continuous_path(single_pop, G, x)
i = 1;
single_new_pop = single_pop;
% 这行代码调用了 size 函数来获取变量 single_new_pop 的大小,并将结果存储在了 single_path_num 变量中。
% 在这里,使用了波浪线 ~ 来表示忽略了 size 函数返回的第一个值(也就是行数),只保留了列数。
% single_new_pop 是一个 1 * 20的向量
% single_path_num 存储了路径经过的点的数量
[~, single_path_num] = size(single_new_pop);% 遍历每一列 1-20
while i ~= single_path_num
% 点i所在列 (从左到右编号)
x_now = mod(single_new_pop(1, i), x) + 1;
% 点i所在行 (从上到下编号)
y_now = fix(single_new_pop(1, i) / x) + 1;
% 点i+1所在行 (从上到下编号)
x_next = mod(single_new_pop(1, i + 1), x) + 1;
y_next = fix(single_new_pop(1, i + 1) / x) + 1;
% 初始化最大迭代次数
max_iteration = 0;
% 如果他们不相连的话
while max(abs(x_next - x_now), abs(y_next - y_now)) > 1
x_insert = floor((x_next + x_now) / 2);
y_insert = floor((y_next + y_now) / 2);
% 取得两者中点值
if G(y_insert, x_insert) == 0
% 栅格值
num_insert = (x_insert - 1) + (y_insert - 1) * x;
% single_new_pop 是一个数组,这段代码的目的是将 num_insert 插入到 single_new_pop 的第 i 个位置之后。
% single_new_pop(1, 1:i) 表示取 single_new_pop 中第1行,从第1列到第i列的元素。
% single_new_pop(1, i+1:end) 表示取 single_new_pop 中第1行,从第i+1列到最后一列的元素。
single_new_pop = [single_new_pop(1, 1:i), num_insert, single_new_pop(1, i+1:end)];
% 如果是障碍物的话
else
% 它检查该点左面是否有路径
% (x_insert - 2) + (y_insert - 1) * x 是否不等于 single_new_pop(1, i)。
if G(y_insert, x_insert - 1) == 0 && ((x_insert - 2) + (y_insert - 1) * x ~= single_new_pop(1, i)) && ((x_insert - 2) + (y_insert - 1) * x ~= single_new_pop(1, i+1))
x_insert = x_insert - 1;
% 索引号
num_insert = (x_insert - 1) + (y_insert - 1) * x;
% 插入
single_new_pop = [single_new_pop(1, 1:i), num_insert, single_new_pop(1, i+1:end)];
elseif G(y_insert, x_insert + 1) == 0 && (x_insert + (y_insert - 1) * x ~= single_new_pop(1, i)) && (x_insert + (y_insert - 1) * x ~= single_new_pop(1, i+1))
x_insert = x_insert + 1;
num_insert = (x_insert - 1) + (y_insert - 1) * x;
single_new_pop = [single_new_pop(1, 1:i), num_insert, single_new_pop(1, i+1:end)];
elseif G(y_insert + 1, x_insert) == 0 && ((x_insert - 1) + y_insert * x ~= single_new_pop(1, i)) && ((x_insert - 1) + y_insert * x ~= single_new_pop(1, i+1))
y_insert = y_insert + 1;
num_insert = (x_insert - 1) + (y_insert - 1) * x;
single_new_pop = [single_new_pop(1, 1:i), num_insert, single_new_pop(1, i+1:end)];elseif G(y_insert - 1, x_insert) == 0 && ((x_insert - 1) + (y_insert - 2) * x ~= single_new_pop(1, i)) && ((x_insert - 1) + (y_insert-2) * x ~= single_new_pop(1, i+1))
y_insert = y_insert - 1;
num_insert = (x_insert - 1) + (y_insert - 1) * x;
single_new_pop = [single_new_pop(1, 1:i), num_insert, single_new_pop(1, i+1:end)];
% 左右上下都是占据的则删去路径
else
%break_pop = single_new_pop
single_new_pop = [];
break
end
end
x_next = x_insert;
y_next = y_insert;
max_iteration = max_iteration + 1;
if max_iteration > 20000
single_new_pop = [];
break
end
end
if isempty(single_new_pop)
break
end
[~, single_path_num] = size(single_new_pop);
i = i + 1;
end了解这些后,我们通过ComputeQ计算Q矩阵,并通过blkdiag合并一个个Q矩阵,最终组成如下形式:

其中k为多项式的段数,也就是说有几段路程,就有几个Q矩阵。
我们看一下Q矩阵的计算方法:

- % n:polynormial order
- % r:derivertive order, 1:minimum vel 2:minimum acc 3:minimum jerk 4:minimum snap
- % t1:start timestamp for polynormial
- % t2:end timestap for polynormial
- % n=5 五次多项式拟合路径 r=3 用jerk模拟 t1 t2
- function Q = computeQ(n,r,t1,t2)
- % (n-r)*2+1 = (5-3)*2+1 = 5
- T = zeros((n-r)*2+1,1);
- for i = 1:(n-r)*2+1
- T(i) = t2^i-t1^i;
- end
- % 理论说过Q是n+1 * n+1的维度 也就是7*7的维度 r是3 表示用jerk进行优化
- % 它的矩阵就右下角有值
- Q = zeros(n+1);
- for i = r+1:n+1 % 行 从r+1开始,因为前r行都是0,在PPT中r=4。在我们的实例中r=3
- for j = i:n+1 % 列 从r+1开始
- k1 = i-r-1; %对应r-3 行-r-1
- k2 = j-r-1; %对应c-3 列-r-1
- k = k1+k2+1;% r-3+c-3+1
- % prod是连乘的意思 prod(k1+1:k1+r)= r-3+1 *...* r-3+3 =
- % (r-3)(r-2)(r-1)r (c-3)(c-2)(c-1)c k就是参数
- Q(i,j) = prod(k1+1:k1+r)*prod(k2+1:k2+r)/k*T(k);
- Q(j,i) = Q(i,j);
- end
- end
- %Q
这里我们传来的n=5,即用五次项拟合曲线,r=4用三阶导数去求极值。
T矩阵就是后面的那块:

这里是对应于4阶snap来说的,我们用三阶作为优化目标那么我们的T矩阵就应当是
 。前三排前三列是0的,因此有值的就是第4行到第n+1=6行。因为是对角矩阵,我们只需算出其中的一半也就是6个值。如下Q矩阵:
。前三排前三列是0的,因此有值的就是第4行到第n+1=6行。因为是对角矩阵,我们只需算出其中的一半也就是6个值。如下Q矩阵:
我们初始化
 矩阵为
矩阵为 的方阵,从r+1行也就是3+1=4行开始赋值,比如第四行,从第四列一直到第n+1列也就是第6列,再比如第五行,从第五列一直到第n+1列也就是第6列。
的方阵,从r+1行也就是3+1=4行开始赋值,比如第四行,从第四列一直到第n+1列也就是第6列,再比如第五行,从第五列一直到第n+1列也就是第6列。首先计算r-3,也就是行-3,i表示遍历哪一行,j表示遍历哪一列,因此我们不妨想想当i与j都为4的时候,行-3对应4-3-1!=0,我们补足-1就是0了。k对应r-3+c-3+1。
就是T(k)。这里我们就理解T矩阵的赋值了,因为它所包含的最高项的次数为r-3+c-3+1的max r和c,r和cmax也就是n+1,因此它的最高项次数也就是 (n-3)*2 + 1。到此,我们的Q矩阵就构造完毕啦。
我们打印一下Q矩阵:

我们来建立约束方程:
% 传入参数 个体的路径 地图 一行有多少个元素x
% 它告诉 MATLAB 这是一个名为 generate_continuous_path 的函数,它接受三个输入参数 single_pop,G 和 x,并且它会返回一个名为 single_new_pop 的变量。
function [single_new_pop] = generate_continuous_path(single_pop, G, x)
i = 1;
single_new_pop = single_pop;
% 这行代码调用了 size 函数来获取变量 single_new_pop 的大小,并将结果存储在了 single_path_num 变量中。
% 在这里,使用了波浪线 ~ 来表示忽略了 size 函数返回的第一个值(也就是行数),只保留了列数。
% single_new_pop 是一个 1 * 20的向量
% single_path_num 存储了路径经过的点的数量
[~, single_path_num] = size(single_new_pop);% 遍历每一列 1-20
while i ~= single_path_num
% 点i所在列 (从左到右编号)
x_now = mod(single_new_pop(1, i), x) + 1;
% 点i所在行 (从上到下编号)
y_now = fix(single_new_pop(1, i) / x) + 1;
% 点i+1所在行 (从上到下编号)
x_next = mod(single_new_pop(1, i + 1), x) + 1;
y_next = fix(single_new_pop(1, i + 1) / x) + 1;
% 初始化最大迭代次数
max_iteration = 0;
% 如果他们不相连的话
while max(abs(x_next - x_now), abs(y_next - y_now)) > 1
x_insert = floor((x_next + x_now) / 2);
y_insert = floor((y_next + y_now) / 2);
% 取得两者中点值
if G(y_insert, x_insert) == 0
% 栅格值
num_insert = (x_insert - 1) + (y_insert - 1) * x;
% single_new_pop 是一个数组,这段代码的目的是将 num_insert 插入到 single_new_pop 的第 i 个位置之后。
% single_new_pop(1, 1:i) 表示取 single_new_pop 中第1行,从第1列到第i列的元素。
% single_new_pop(1, i+1:end) 表示取 single_new_pop 中第1行,从第i+1列到最后一列的元素。
single_new_pop = [single_new_pop(1, 1:i), num_insert, single_new_pop(1, i+1:end)];
% 如果是障碍物的话
else
% 它检查该点左面是否有路径
% (x_insert - 2) + (y_insert - 1) * x 是否不等于 single_new_pop(1, i)。
if G(y_insert, x_insert - 1) == 0 && ((x_insert - 2) + (y_insert - 1) * x ~= single_new_pop(1, i)) && ((x_insert - 2) + (y_insert - 1) * x ~= single_new_pop(1, i+1))
x_insert = x_insert - 1;
% 索引号
num_insert = (x_insert - 1) + (y_insert - 1) * x;
% 插入
single_new_pop = [single_new_pop(1, 1:i), num_insert, single_new_pop(1, i+1:end)];
elseif G(y_insert, x_insert + 1) == 0 && (x_insert + (y_insert - 1) * x ~= single_new_pop(1, i)) && (x_insert + (y_insert - 1) * x ~= single_new_pop(1, i+1))
x_insert = x_insert + 1;
num_insert = (x_insert - 1) + (y_insert - 1) * x;
single_new_pop = [single_new_pop(1, 1:i), num_insert, single_new_pop(1, i+1:end)];
elseif G(y_insert + 1, x_insert) == 0 && ((x_insert - 1) + y_insert * x ~= single_new_pop(1, i)) && ((x_insert - 1) + y_insert * x ~= single_new_pop(1, i+1))
y_insert = y_insert + 1;
num_insert = (x_insert - 1) + (y_insert - 1) * x;
single_new_pop = [single_new_pop(1, 1:i), num_insert, single_new_pop(1, i+1:end)];elseif G(y_insert - 1, x_insert) == 0 && ((x_insert - 1) + (y_insert - 2) * x ~= single_new_pop(1, i)) && ((x_insert - 1) + (y_insert-2) * x ~= single_new_pop(1, i+1))
y_insert = y_insert - 1;
num_insert = (x_insert - 1) + (y_insert - 1) * x;
single_new_pop = [single_new_pop(1, 1:i), num_insert, single_new_pop(1, i+1:end)];
% 左右上下都是占据的则删去路径
else
%break_pop = single_new_pop
single_new_pop = [];
break
end
end
x_next = x_insert;
y_next = y_insert;
max_iteration = max_iteration + 1;
if max_iteration > 20000
single_new_pop = [];
break
end
end
if isempty(single_new_pop)
break
end
[~, single_path_num] = size(single_new_pop);
i = i + 1;
end- %求解F(不等式) 构建全是0的向量
- b_all = zeros(size(Q_all,1),1);
- % 构建等式约束 4K+2 多项式的个数*每个项的系数
- Aeq = zeros(4*n_poly+2,n_coef*n_poly);
- beq = zeros(4*n_poly+2,1);
- % 起点/终点的位置速度和加速度 (6 equations)
- % 1-3行 第一个参数到n_order+1=6 位置、速度、加速度
- Aeq(1:3,1:n_coef) = [calc_tvec(ts(1),n_order,0);
- calc_tvec(ts(1),n_order,1);
- calc_tvec(ts(1),n_order,2)];
- % 终点约束4-6
- Aeq(4:6,n_coef*(n_poly-1)+1:n_coef*n_poly) = ...
- [calc_tvec(ts(end),n_order,0);
- calc_tvec(ts(end),n_order,1);
- calc_tvec(ts(end),n_order,2)];
- beq(1:6,1) = [p0,v0,a0,pe,ve,ae]';

- % r=0:pos 1:vel 2:acc 3:jerk
- % n_order 多项式的阶数
- % t 第i段占据的时间
- % r 0 1 2 对应 位置 速度 加速度
- function tvec = calc_tvec(t,n_order,r)
- tvec = zeros(1,n_order+1);
- for i=r+1:n_order+1
- tvec(i) = prod(i-r:i-1)*t^(i-r-1);
- end
- end
回顾一下,我们n_poly,它的值为多项式的段数也就是航路点-1,本例中n_poly =4
n_coef为多项式的次数+1,这里我们为6。
先看一下它的形式吧:我们打印一下约束方程的Aeq

它的行数为18(4*n_poly+2),列数为24(n_coef *n_poly )。我们看看它里面存储的是什么吧!
1-6行我们加入起点和终点的约束(位移、速度、加速度):
- % 起点/终点的位置速度和加速度 (6 equations)
- % 1-3行 第一个参数到n_order+1=6 位置、速度、加速度
- Aeq(1:3,1:n_coef) = [calc_tvec(ts(1),n_order,0);
- calc_tvec(ts(1),n_order,1);
- calc_tvec(ts(1),n_order,2)];
- % 终点约束4-6
- Aeq(4:6,n_coef*(n_poly-1)+1:n_coef*n_poly) = ...
- [calc_tvec(ts(end),n_order,0);
- calc_tvec(ts(end),n_order,1);
- calc_tvec(ts(end),n_order,2)];
起点约束放在起点的位置上,因为一个约束是有5阶+1个常数项的,因此一个约束占据6列。一共4段路线,是这么来的24行。
从第七行开始固定中间的点。从第七行开始到第十行。
- neq = 6;
- % 从第七行开始
- for i=1:n_poly-1
- neq=neq+1;
- Aeq(neq,n_coef*i+1:n_coef*(i+1)) = calc_tvec(ts(i+1),n_order,0);
- beq(neq) = waypts(i+1);
- end
位置为行数,一个占据自己的六个位置,如下:

下面开始连续性约束:
- % 段数-1 continuous constraints ((n_poly-1)*3 equations)
- for i=1:n_poly-1
- tvec_p = calc_tvec(ts(i+1),n_order,0);
- tvec_v = calc_tvec(ts(i+1),n_order,1);
- tvec_a = calc_tvec(ts(i+1),n_order,2);
- neq=neq+1;
- Aeq(neq,n_coef*(i-1)+1:n_coef*(i+1))=[tvec_p,-tvec_p];
- neq=neq+1;
- Aeq(neq,n_coef*(i-1)+1:n_coef*(i+1))=[tvec_v,-tvec_v];
- neq=neq+1;
- Aeq(neq,n_coef*(i-1)+1:n_coef*(i+1))=[tvec_a,-tvec_a];
- end
对位移、速度、加速度进行约束。n_coef*(i-1)+1:n_coef*(i+1)代表每一次处理一个点,如下:

圈起来的就是一对邻接点的位移、速度、加速度。
我们添加完约束之后,开始求解
- Aieq = [];
- bieq = [];
- p = quadprog(Q_all,b_all,Aieq,bieq,Aeq,beq);
- polys = reshape(p,n_coef,n_poly);
我们这里没有不等式约束,故设置Q_all,b_all为空,我们求解的变量就是p。
是不是很简单呢?
看一下运行结果:

3 完整代码
- % 传入参数 个体的路径 地图 一行有多少个元素x
- % 它告诉 MATLAB 这是一个名为 generate_continuous_path 的函数,它接受三个输入参数 single_pop,G 和 x,并且它会返回一个名为 single_new_pop 的变量。
- function [single_new_pop] = generate_continuous_path(single_pop, G, x)
- i = 1;
- single_new_pop = single_pop;
- % 这行代码调用了 size 函数来获取变量 single_new_pop 的大小,并将结果存储在了 single_path_num 变量中。
- % 在这里,使用了波浪线 ~ 来表示忽略了 size 函数返回的第一个值(也就是行数),只保留了列数。
- % single_new_pop 是一个 1 * 20的向量
- % single_path_num 存储了路径经过的点的数量
- [~, single_path_num] = size(single_new_pop);
- % 遍历每一列 1-20
- while i ~= single_path_num
- % 点i所在列 (从左到右编号)
- x_now = mod(single_new_pop(1, i), x) + 1;
- % 点i所在行 (从上到下编号)
- y_now = fix(single_new_pop(1, i) / x) + 1;
- % 点i+1所在行 (从上到下编号)
- x_next = mod(single_new_pop(1, i + 1), x) + 1;
- y_next = fix(single_new_pop(1, i + 1) / x) + 1;
- % 初始化最大迭代次数
- max_iteration = 0;
- % 如果他们不相连的话
- while max(abs(x_next - x_now), abs(y_next - y_now)) > 1
- x_insert = floor((x_next + x_now) / 2);
- y_insert = floor((y_next + y_now) / 2);
- % 取得两者中点值
- if G(y_insert, x_insert) == 0
- % 栅格值
- num_insert = (x_insert - 1) + (y_insert - 1) * x;
- % single_new_pop 是一个数组,这段代码的目的是将 num_insert 插入到 single_new_pop 的第 i 个位置之后。
- % single_new_pop(1, 1:i) 表示取 single_new_pop 中第1行,从第1列到第i列的元素。
- % single_new_pop(1, i+1:end) 表示取 single_new_pop 中第1行,从第i+1列到最后一列的元素。
- single_new_pop = [single_new_pop(1, 1:i), num_insert, single_new_pop(1, i+1:end)];
- % 如果是障碍物的话
- else
- % 它检查该点左面是否有路径
- % (x_insert - 2) + (y_insert - 1) * x 是否不等于 single_new_pop(1, i)。
- if G(y_insert, x_insert - 1) == 0 && ((x_insert - 2) + (y_insert - 1) * x ~= single_new_pop(1, i)) && ((x_insert - 2) + (y_insert - 1) * x ~= single_new_pop(1, i+1))
- x_insert = x_insert - 1;
- % 索引号
- num_insert = (x_insert - 1) + (y_insert - 1) * x;
- % 插入
- single_new_pop = [single_new_pop(1, 1:i), num_insert, single_new_pop(1, i+1:end)];
- elseif G(y_insert, x_insert + 1) == 0 && (x_insert + (y_insert - 1) * x ~= single_new_pop(1, i)) && (x_insert + (y_insert - 1) * x ~= single_new_pop(1, i+1))
- x_insert = x_insert + 1;
- num_insert = (x_insert - 1) + (y_insert - 1) * x;
- single_new_pop = [single_new_pop(1, 1:i), num_insert, single_new_pop(1, i+1:end)];
- elseif G(y_insert + 1, x_insert) == 0 && ((x_insert - 1) + y_insert * x ~= single_new_pop(1, i)) && ((x_insert - 1) + y_insert * x ~= single_new_pop(1, i+1))
- y_insert = y_insert + 1;
- num_insert = (x_insert - 1) + (y_insert - 1) * x;
- single_new_pop = [single_new_pop(1, 1:i), num_insert, single_new_pop(1, i+1:end)];
- elseif G(y_insert - 1, x_insert) == 0 && ((x_insert - 1) + (y_insert - 2) * x ~= single_new_pop(1, i)) && ((x_insert - 1) + (y_insert-2) * x ~= single_new_pop(1, i+1))
- y_insert = y_insert - 1;
- num_insert = (x_insert - 1) + (y_insert - 1) * x;
- single_new_pop = [single_new_pop(1, 1:i), num_insert, single_new_pop(1, i+1:end)];
- % 左右上下都是占据的则删去路径
- else
- %break_pop = single_new_pop
- single_new_pop = [];
- break
- end
- end
- x_next = x_insert;
- y_next = y_insert;
- max_iteration = max_iteration + 1;
- if max_iteration > 20000
- single_new_pop = [];
- break
- end
- end
- if isempty(single_new_pop)
- break
- end
- [~, single_path_num] = size(single_new_pop);
- i = i + 1;
- end
-
相关阅读:
Linux思维导图
chmod,rwx Linux文件属性笔记221107
腾讯云服务器地域是什么?地域选择看着一篇就够了
深入了解C++中各种不同意义的new和delete
探索ChatGPT的Fine-tuning和Embeddings
字符函数和字符串函数(C语言进阶)
Vue 最简单路由 页面路由 配置路由
JavaScript中判断数据类型,浅拷贝和深拷贝详解
实验7(MPLS实验)
MySQL数据库之索引
- 原文地址:https://blog.csdn.net/qq_41694024/article/details/134282282
