-
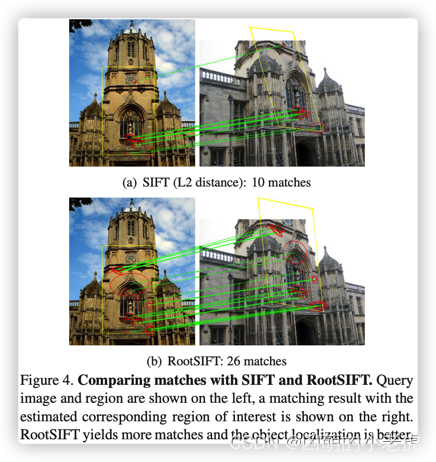
RootSIFT---SIFT图像特征的扩展
RootSIFT是论文 Three things everyone should know to improve object retrieval - 2012所提出的
A Comparative Analysis of RootSIFT and SIFT Methods for Drowsy Features Extraction - 2020当比较直方图时,使用欧氏距离通常比卡方距离或Hellinger核时的性能差,但是在使用 SIFT 特征点为什么一直都使用欧氏距离呢?
不论是对 SIFT 特征点进行匹配,还是对 SIFT 特征集合进行聚类得到视觉词汇表,又或者对图像进行BoW编码,都使用的是欧氏距离. 但是 SIFT 特征描述子本质上也是一种直方图,为什么对 SIFT 特征描述子进行比较的时候要使用欧氏距离呢,有没有一种更精确的比较方法呢?
SIFT 描述子统计的是关键点邻域的梯度直方图.- 1
论文作者认为之所以一直使用欧氏距离来测量 SIFT 特征的相似度,是由于在 SIFT 提出时,使用的是欧氏距离的度量,可以找出一种比较欧氏距离更为精确的度量方法. 故,提出了RootSift 对 SIFT 特征进行扩展.
具体操作如下:
在提取到 SIFT 描述向量 x x x 后,进行如下处理,即可得到 RootSIFT:
[1] - 对特征向量 x x x 进行 l 1 l_1 l1 的归一化得到 x ′ x' x′ ;
[2] - 对 x ′ x' x′的每一个元素求平方根;
[3] - 进行 l 2 l_2 l2归一化.(可选)
- [3]中,是否进行l2归一化,有些不一致. 在[RootSIFT]论文 中并没有指出需要进行 l2 归一化,但是在 presentation, 却有 l2归一化.
参考:图像检索(4):IF-IDF,RootSift,VLAD – RootSIFT
1. RootSIFT 实现
Python 实现如:
- https://www.pyimagesearch.com/2015/04/13/implementing-rootsift-in-python-and-opencv/
- https://github.com/jrosebr1/imutils/blob/master/imutils/feature/rootsift.py
import numpy as np import cv2 class RootSIFT: def __init__(self): # initialize the SIFT feature extractor #OpenCV2.4 # self.extractor = cv2.DescriptorExtractor_create("SIFT") #OpenCV3+ self.extractor = cv2.xfeatures2d.SIFT_create() def compute(self, image, kps, eps=1e-7): # compute SIFT descriptors kps, descs = self.extractor.compute(image, kps) # if there are no keypoints or descriptors, return an empty tuple if len(kps) == 0: return ([], None) # apply the Hellinger kernel by first L1-normalizing and taking the # square-root descs /= (descs.sum(axis=1, keepdims=True) + eps) descs = np.sqrt(descs) #descs /= (np.linalg.norm(descs, axis=1, ord=2) + eps) # return a tuple of the keypoints and descriptors return (kps, descs) # image = cv2.imread("test.jpg") gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY) # detect Difference of Gaussian keypoints in the image sift = cv2.xfeatures2d.SIFT_create() kps, descs = sift.detectAndCompute(img1, None) print "SIFT: kps=%d, descriptors=%s " % (len(kps), descs.shape) # extract RootSIFT descriptors root_sift = RootSIFT() (kps, descs) = root_sift.compute(image, kps) print "RootSIFT: kps=%d, descriptors=%s " % (len(kps), descs.shape)- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
C++ 实现:
for(int i = 0; i < siftFeature.rows; i ++) { // Conver to float type Mat f; siftFeature.row(i).convertTo(f,CV_32FC1); normalize(f,f,1,0,NORM_L1); // l1 normalize sqrt(f,f); // sqrt-root root-sift rootSiftFeature.push_back(f); }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
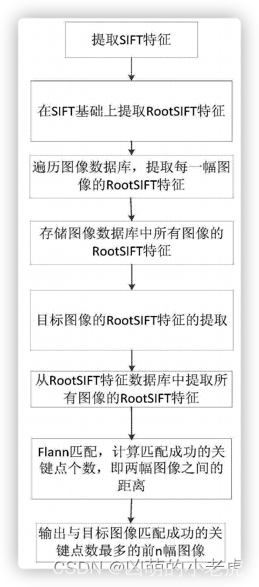
2. 基于 RootSIFT 的相似图搜索
-
相关阅读:
运维监控Grafana部署
基于springboot的鲜花管理系统
java内部类学习总结/lambda表达式总结
Sklearn基本算法
FootPrintTools...
ROS从入门到精通5-3:插件库与开发+实例分析
JPA 分页
【网络】网络编程套接字(一)
Java项目:springboot+vue电影院会员管理系统
病人预约的分析
- 原文地址:https://blog.csdn.net/T_T_T_T_/article/details/133831349
