-
课题学习(一)----静态测量
最近突然心血来潮,打算将自己阅读论文中的重点内容进行整理,以便在今后开题和中期答辩以及毕业论文中可以用到。
暂时先将静态测量的相关知识整理一下,后面的学习中也将所学知识以及笔记整理到博客中。
当前的随钻测量系统一半包含三轴磁力计和三轴加速度计,参考坐标系为地理坐标系:X指向地理北;Y指向地理西;Z轴指向上。载体坐标系:Z轴为钻头的轴向,X、Y轴在钻头的横截面上相互垂直。
根据欧拉旋转变换原理,相对于地理坐标系进行有效词旋转即可得到载体在空间中的三位姿态坐标。补充: 欧拉旋转变换定理是关于物体在三维空间中旋转的数学原理。
该定理说明了任何一个三维空间中的旋转可以通过一系列的绕固定轴的旋转来实现。这些轴可以是任意的,但通常选择的是固定坐标系的轴,如X、Y、Z轴。
具体来说,欧拉旋转变换定理认为,任何一个三维空间中的旋转可以分解为以下三个步骤:- 绕一个固定的轴旋转(例如绕X轴旋转)。这个旋转会改变物体的姿态,使得它在新的坐标系中的X轴与原始坐标系中的X轴重合。
- 绕新的Y轴旋转。在第一步旋转之后,新的Y轴可能与原始坐标系中的Y轴不再平行。这一步的目的是将新的Y轴旋转至与原始坐标系的Y轴平行。
- 再次绕新的Z轴旋转。在前两步旋转之后,新的Z轴可能与原始坐标系中的Z轴不再平行。这一步的目的是将新的Z轴旋转至与原始坐标系的Z轴平行。
通过这三个步骤,可以实现任意的三维旋转。
需要注意的是,欧拉旋转的顺序很重要,不同的旋转顺序会导致不同的结果。例如,先绕X轴旋转再绕Y轴旋转的效果会与先绕Y轴再绕X轴旋转的效果不同。
此外,欧拉旋转变换也存在一个问题,称为奇异性(Gimbal Lock)问题,它会在某些情况下限制旋转的自由度。为了解决这个问题,有时候会使用四元数或旋转矩阵来代替欧拉角进行旋转的表示和计算。如下图:
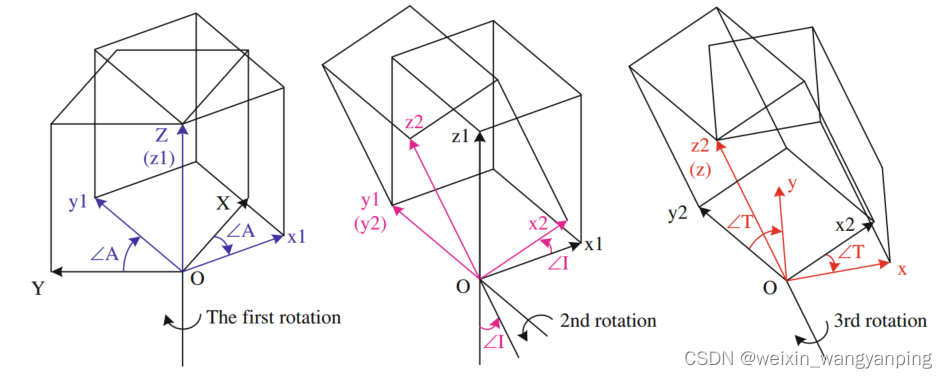
首先沿着OZ轴旋转一个角度,旋转之后的角度叫做"方位角";之后,沿着Oy1(由于此时的Y轴与之前的状态不再重合),旋转之后的角度叫做"倾斜角",或者简称"倾角";最后再将状态二沿着Oz2旋转一个角度,形成"工具面角"。在石油工程和地质学领域中,有几个重要的角度概念:
1.井斜角(Inclination):
井斜角指的是钻井井眼与垂直线之间的夹角,也就是井眼的倾斜程度。通常以度数(°)来表示。如果井斜角为零,表示井眼是垂直的;如果井斜角大于零,表示井眼是倾斜的。
2.方位角(Azimuth):
方位角指的是钻井井眼的方向角度,也就是井眼在水平平面上的方向。通常以度数(°)来表示。方位角通常是相对于某个参考方向,比如北方,来测量的。
3.工具面角(Toolface Angle):
工具面角是钻头或测量工具上特定面的角度,它通常相对于井眼轨迹的方向来定义。工具面角在井斜方向上提供了额外的控制,允许钻井工程师在井眼内选择特定的方向。假设上述状态的姿态变换矩阵分别同RZ(ψ), RY(θ) and RZ(φ)表示,则两个参考系之间的方位余弦矩阵Ctd:

需要注意的是,方位余弦矩是由右向左相乘,即由状态1的RZ(ψ)在最右边。最后展开可写作下式:

下面(3.6),(3.7)两式子是两个坐标系之间的基本变换关系,也是钻孔时测量系统姿态计算的理论基础:


则地球的重力场和磁场在地理坐标系(北-西-上)的分量分别是:

BH为地磁场的向北的水平分量,代表地球磁场强度;BV是地球磁场轻度的垂直分量。于是可以将重力场、磁场的三轴表达式由方位余弦矩阵表示:

定义刀具面φG,倾角θ,方位角ψ,由上图可计算得到:

补充:BH=BcosΦ,BH=BsinΦ,Φ是当地的磁倾角
然后得到工具面、倾角和方位角:

当倾角θ较小时,很难计算重力工具的面角,如果θ=0,则测量的Gx和Gy应为零,则不能使用上式。即使θ不为零,当θ较小时,作用在测量传感器上的重力加速度分量Gx、Gy也很小,实际测量信号变得很弱,噪声效应明显增强。此时,如果还用重力加速度分量来计算刀具面φG,就会非常不准确。磁传感器测得的磁分量Bx和By主要由地磁场的水平分量决定,地磁分量不受载体姿态的影响。因此,在斜度较小的井中,采用磁力工具面角φM代替所需的重力工具面角。

在实际应用中,为了提高井底空间姿态的计算精度,通常采用重力分量和地磁分量信号在一个窗口内一段时间内的均值来求解。
论文"Method for measurement of azimuth of a borehole while drilling"从另一个角度给出了如下计算公式。方位角方程可由下式得到:

我的研究课题是动态测量,不过有关静态测量的知识是可以用在动态测量上面的,可以为动态测量打基础。 -
相关阅读:
论文阅读10——《Adversarially regularized joint structured clustering network》
dreamweaver家乡主题网页设计 DIV布局个人介绍网页模板代码 DW学生个人网站制作成品下载 HTML5期末大作业
【MySQL系列】MySQL数据库索引详解
CTF中的一些图形密码
rocketMQ简单理解
使用IDEA让文本对比不在变的困难
基于java病人追踪治疗信息系统计算机毕业设计源码+系统+lw文档+mysql数据库+调试部署
CH9101国产USB转异步串口芯片兼容替代PL2303GC/PL2303HXD/FT230X/FT232RQ/CY7C65213
线性回归方程
Redis Key-Value数据库 【高级】
- 原文地址:https://blog.csdn.net/weixin_44412311/article/details/133148494