-
单视觉L2市场「鲶鱼」来了,掀起数据反哺高阶新打法
作者 | 张祥威
编辑 | 德新
智驾方案的降本行动仍在推进。
早年,单视觉L2市场的玩家以Mobileye、博世为主,后来国内智驾公司加入,共同推动 1V、1R1V、nR1V等不同的方案兴起,L2近乎成为车辆的必备功能。
当下,在行业降低智驾成本的大背景下,有行业公司提出,可以推出成本极致下探的单视觉L2方案,并能解决行业的两大痛点:
- 降低AEB误报率,帮助车企拿到CNCAP五星成绩;
- 支持数据回传,为高阶智驾迭代打下基础。
与以往的L2方案相比,今天的单视觉L2正在变强,且有了更高的可靠性,成为主机厂向高阶辅助驾驶进军的入场券。
1. 单视觉成本香但有痛点,行业关注AEB误触发率
2017年,随着特斯拉Model 3开启规模交付,L2逐渐进入公众视野。
国内市场中,先后出现1R1V、3R1V、5R1V的L2方案,后来还出现了加入激光雷达的L2+方案。再后来,随着主机厂降本、便于管理的需求,又出现了行泊一体等。
对性能的极致压榨,其中一个代表是特斯拉。其采用144TOPS的算力坚持使用120万像素的摄像头,来实现L2、L2+的功能更新,并且一直在做传感器的减法,比如去掉毫米波雷达等。

国内主机厂在极致成本竞争下,也已经开始做减法,行业开始出现去高精地图、去雷达等声音。
回到L2方案上,过去行业的主流做法是通过1R1V方案来实现L2功能,比如AEB等。
为了降低成本,行业后来又开始去掉毫米波雷达,出现1V方案。不过,去掉毫米波雷达后,仅依靠单个摄像头容易发生“幽灵刹车”,就是AEB误触发率高的问题。
要解决传统的1V方案幽灵刹车的问题,需要大量的数据,但是又不能拿量产车主机厂当小白鼠。主机厂希望降低成本,又担心去掉毫米波雷达产生的幽灵刹车。这是过去行业推进「1V」这种极简L2方案时遇到的问题。
为解决AEB的误触发,MAXIEYE做了多种算法冗余,通过两套甚至更多套不同的算法来进行目标物的检测,不同算法的检测特征、原理是完全不同的,并可以相互校验。
比如,对行人的检测,一套算法会检测行人的整体轮廓,另一套算法会检测行人的关节、头等局部特征。
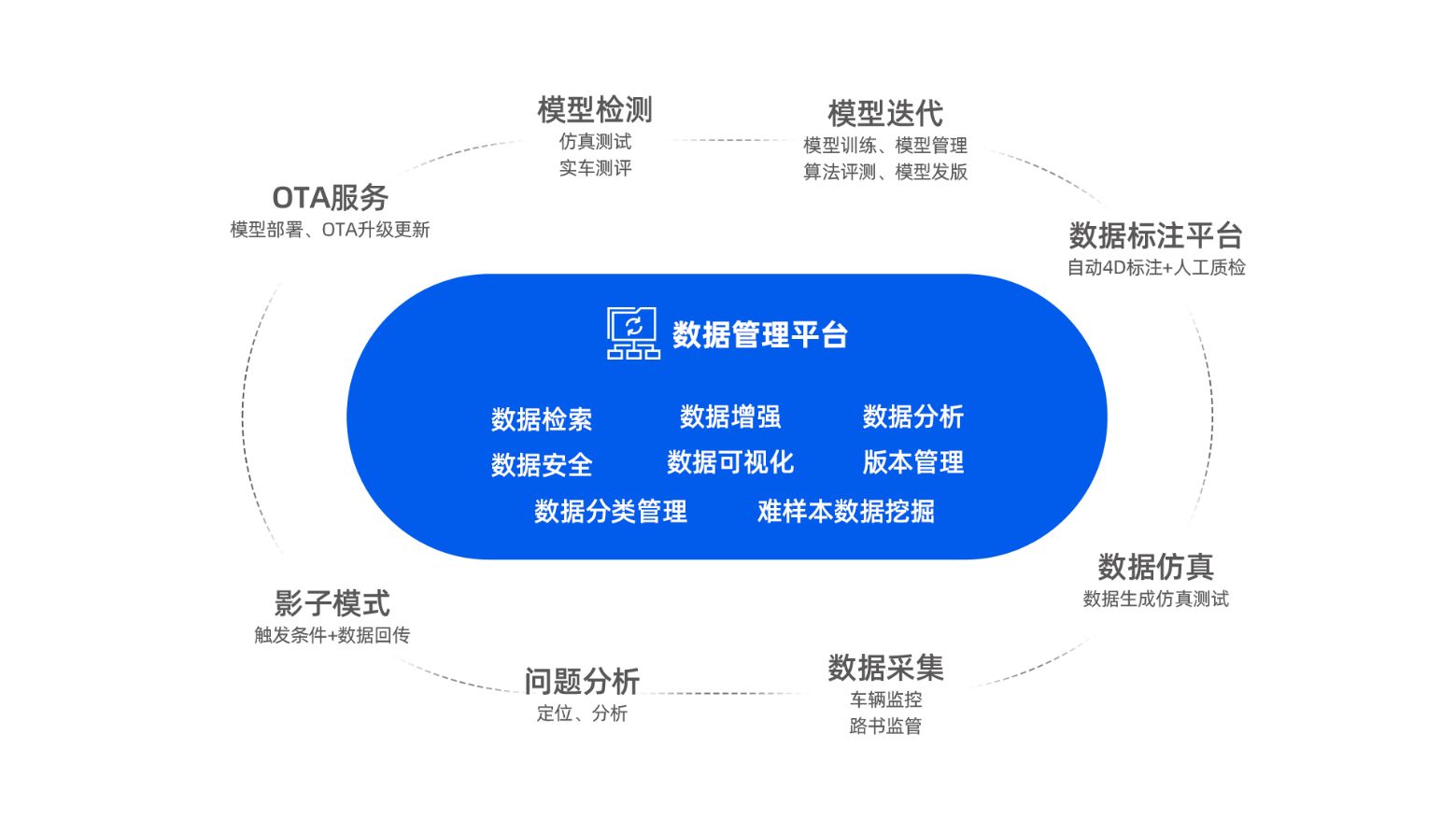
5月24日,智驾科技MAXIEYE发布了牧童MonoToGo 单视觉L2解决方案,一站式实现L2全功能集成,具备数据闭环全场景复现、事件触发数据回传等功能。
面向当下单V行业痛点,该方案针对性解决了AEB误触发等问题,满足CNCAP五星+主动安全评分。
极简极致的L2方案再次被刷新。

据悉,这款单视觉L2方案的Vision Only产品在CNCAP标准测试中,主动安全ADAS部分更是得到了88.56%的分数。
要获得CNCAP主动安全五星,需要系统具备很高的敏感性,同时保证量产时AEB不会出现误触发,考验方案的平衡能力。许多主机厂为了让量产的车减少误触,会把系统调整得很保守,从而无法获得CNCAP的五星高分。
值得一提的是,MAXIEYE单V产品刷新系统安全指标,这背后有一套数据迭代的逻辑。
随着量产上车的方案不断积累更多数据,MAXIEYE会不断地训练这套视觉方案,精度、性能、场景随之提升,从而在主动安全上获得更好的分值。
2. 从产品底层设计,建立数据回传机制
获得主动安全五星成绩,仅仅是MAXIEYE的单视觉L2方案能力的一部分。更为重要的是,MAXIEYE的L2方案所具备的数据回传能力。
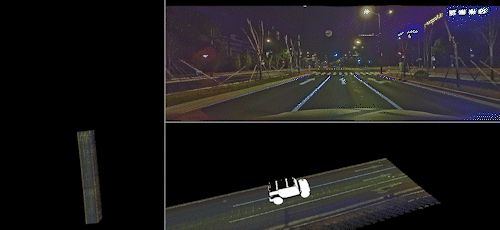
“单视觉方案最怕的是一些Ghost(鬼影)。”MAXIEYE创始人兼CEO周圣砚告诉HiEV,因为视觉无法形成深度信息,经过龙门架时,会把龙门架当成大卡车的车尾,进隧道时,也可能把隧道的杆子当成车尾,而要解决鬼影问题,就需要大量的数据积累。
为了做好数据积累,早在2019年左右,MAXIEYE发布1R1V方案时,就为这套方案设计了支持数据回传和事件触发视频回传的机制。这是当时行业的其他方案没有考量的。
MAXIEYE在1R1V方案中运行了单V的影子系统,利用影子系统,可以把由于缺少毫米波雷达校验所产生的AEB误触发数据全部回传回来,用于之后的数据训练和算法迭代。
据介绍,在1R1V和单V方案市场,MAXIEYE是唯一一家具备数据回传能力的公司。
为了开发这样一套系统,MAXIEYE在选择芯片时,就要求芯片必须支持H.264视频编码。“视频编码直接决定了方案的后续能力,比如影子系统、数据回传,以及通过回传来训练深度学习的卷积网络。”
彼时,一款芯片既要有足够的算力去部署深度学习算法,同时又支持H.264编码,这样的芯片产品并不多,它考验的是芯片公司的IP设计和产品定义能力。
据了解,许多智驾方案供应商早期推出的芯片并不具备H.264视频编码能力,数据回传主要靠大量的人工成本,在方案量产之前通过大量的试验车采集各种工况数据,数据获取的成本相对较高。

除了芯片,MAXIEYE自身也基于底层感知自研算法,实现视觉感知网络的迭代。目前已经实现高测距测速精度、高环境适应性。
受限于芯片算力,L2的算法采用的是MAXI-NET 1.0深度学习网络。
据周圣砚介绍,机器学习对算法检测率的提升主要来自两个途径:
- 一是,提升卷积网络设计,采用运算能力比较大的卷积网络;
- 二是,在量产的产品上,由于可用的算力不高,通常为2 - 3TOPS,此时想要提高检测率就要通过数据。
最终,MAXIEYE选择了安霸和TI的芯片,并通过算法的不断迭代,获取大量量产上车的L2方案回传的数据,其场景数据规模量已经累计超2亿公里。
这种前瞻性设计,为后来解决AEB误触发、获得CNCAP主动安全五星成绩打下了基础。
更关键的是,它还为系统向高阶辅助驾驶迭代留出空间。
3. 向高阶辅助驾驶迭代
主机厂为了提高竞争力,需要提升L2的搭载率,并且方案最好支持向L2+、L2++等高阶功能进化。
要做到高阶辅助驾驶,要包含上下匝道、过路口等,核心是解决路口的拓扑。
MAXIEYE的单V方案可以支持在经过十字路口时,按照设计好的触发机制,将过路口前后五秒的视频回传到云端。同时,MAXIEYE在云端为主机厂准备了一套VSLAM和地图重构的算法,将单V的视频用VSLAM的方式创建整个道路拓扑,作为高阶的地图真值去训练高阶辅助驾驶。
周圣砚认为,虽然单V的算力有限,运行不了BEV算法,无法感知道路的分叉、汇合等拓扑信息,但行业当下L2和L2+的配置率大概会是8:2。可以用80%车辆L2采集的数据,为20%车辆提供城市NOA道路拓扑信息。
这一过程考验的便是数据闭环能力。
它要求:
整车厂的车辆具备以太网的架构,以太网不只用于ADAS的数据回传,还可以用于车机等;
智驾供应商具备数据脱敏能力,要用算法把行人的脸、车牌照信息脱敏,L2方案的芯片算力本身有限,将数据脱敏算法植入进去,技术挑战颇大。
站在主机厂的角度,如果不具备数据回传能力,意味着和燃油车时代的“放养”没有任何区别。而且,由于L2的配置率很高,如果无法支持数据回传,数十万乃至近百万辆车无监管地行驶在路上,主机厂对于车辆的数据掌控力也会变弱。
具备数据回传能力后,主机厂可以联合智驾供应商一起设计触发机制,提供基于触发机制的数据回传,以还原现场。
它不仅可以提升ADAS本身的性能,也能拓展L2的功能边界。
比如,安全气囊起爆后,如果将起爆前后五秒进行数据回传,就可以帮助主机厂用来做起爆点的设计等等。
目前看,要进入智能驾驶领域,单视觉L2基本上是性价比最高的入场券了。
对于主机厂来说,一方面这张入场券的成本更低。另一方面,也是更为关键的,它能为进入NOA等高阶自动驾驶做好准备。
单视觉L2采集的数据,可以做场景触发,将数据回传支持NOA的迭代。也就是说,遇到的每个corner case,都能攒下经验值,为以后的算法迭代打下基础。
对于售价更低比如售价10万元以下的车型来说,成本更低且具备数据积累能力的智驾方案,是有着不错的吸引力的。
最终,用户感受到的是更加安全的巡航功能,主机厂可以在主动安全方面获得CNCAP五星评分,并且具备了数据迭代能力。
未来某天,随着传感器本身成本下降,单视觉L2的硬件可能会被替换,但那时,主机厂已经从算法层面获取更多的海量数据,拿到了迈入高阶辅助驾驶的入场券。

-
相关阅读:
人机与元宇宙
20231008工作心得:sql
mysql根据多字段分组——group by带两个或多个参数
两篇论文的分享
借助模糊逻辑将文化算法与和谐搜索相结合进行学习(Matlab代码实现)
牛客网Python专项练习重点题整理
设计模式-07-装饰器模式
多模态大语言模型综述(中)-算法实用指南
文盘Rust——起手式,CLI程序
牛客题目——最长公共子串、最长回文子串、兑换零钱
- 原文地址:https://blog.csdn.net/shenzhoubb2017/article/details/130855924