-
【毕业设计】29-交流电机步_进电机的转速测量与控制系统设计(原理图、仿真、源代码、答辩论文、答辩PPT)
typora-root-url: ./
【毕业设计】29-交流电机/步进电机的转速测量与控制系统设计(原理图、仿真、源代码、答辩论文、答辩PPT)
任务书
设计内容:交流电机的转速测量与控制系统设计
设计要求: 1.在确定论文方向的基础上收集、整理资料,并在对所收集资料有所理解的基础上科学拟定题目,写出开题报告。 2.论文要紧扣主题,思路清晰,主题明确。根据主题的具体要求,完成交流电机的转速检测方案设计、硬件选型、安装方法、检测后数值的处理等。 3.利用单片机或者PLC完成转速测量后的显示与闭环控制。 4.完成上位机的设计和组态画面的设计,要求能够使用上位机实时修改交流电机的转速值。论文中采用的解决办法和思路,设计的控制过程,说明原理。并用电脑软件仿真结果(如果不能仿真也需要有详细计算过程)。 5.论文计算过程要说明,插图部分、仿真过程要做说明。 论文方案设计部分,控制系统设计部分要附电路图,方案图。
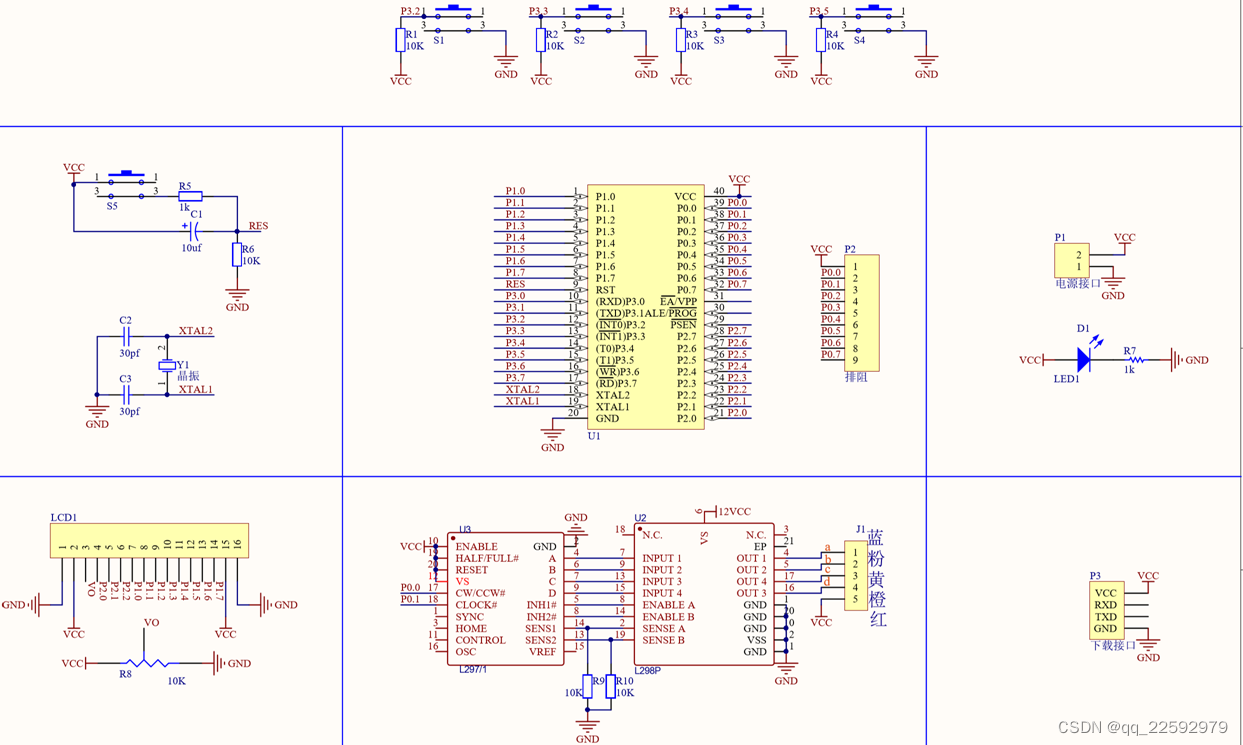
原理图工程文件
原理图截图
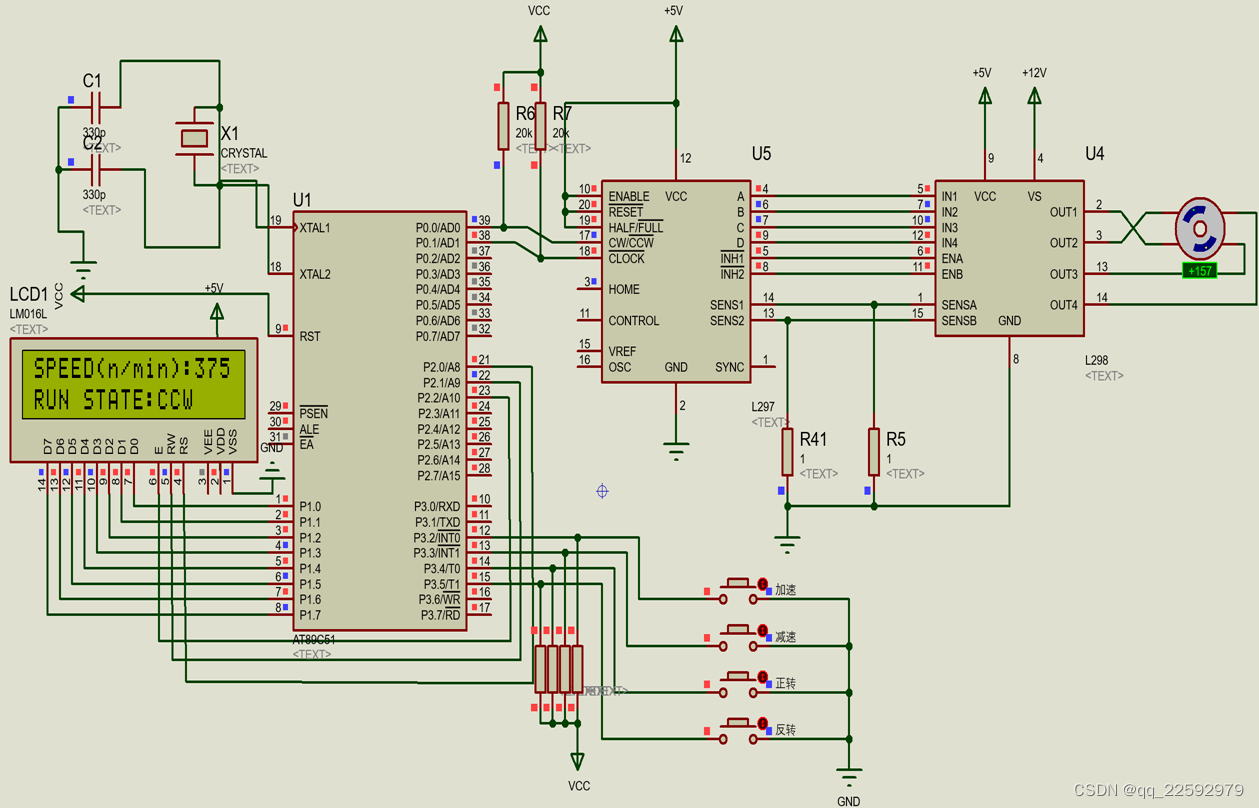
仿真模型工程文件
仿真截图
搭建视频
答辩论文低重复率文档,22874字
答辩PPT
英文文献及翻译设计说明书
摘要
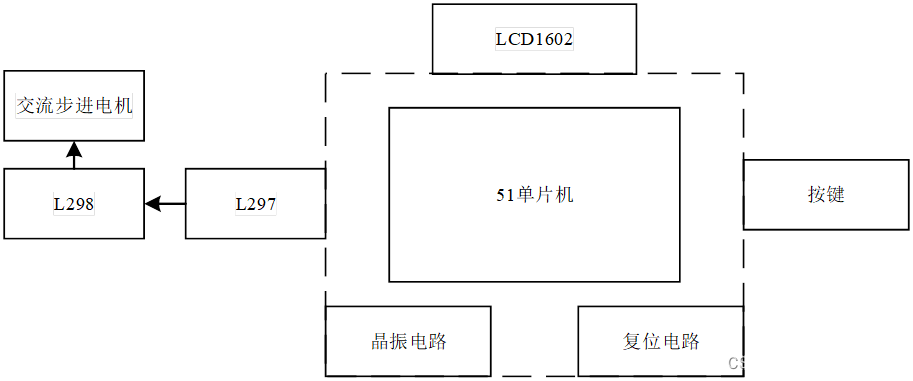
本系统通过对交流步进电机研究。在系统的设计上首先根据系统设计要求规划系统功能,对系统的硬件电路设计软件程序编写,在硬件和软件上均采用模块化的方式实现系统的设计,保证在软件硬件上设计的稳定性强,可靠性高,抗干扰能力强。在系统设计上充分考虑了系统的性价比,系统选择使用51单片机作为主控芯片,L297为电机驱动芯片,L298N为交流步进电机控制芯片,LCD1602作为显示器,按键控制电机,设计了一个交流电机的转速测量与控制系统。
系统可以通过按键对系统控制,可以使交流步进电机实现正反转,加减速度的控制,并将速度实时显示到LCD1602上。系统使用AD软件对系统的原理图绘制、Visio绘制系统结构框图以及程序流程图、Keil软件C语言编写程序、Proteus仿真系统。经过测试最后实现了系统的功能。
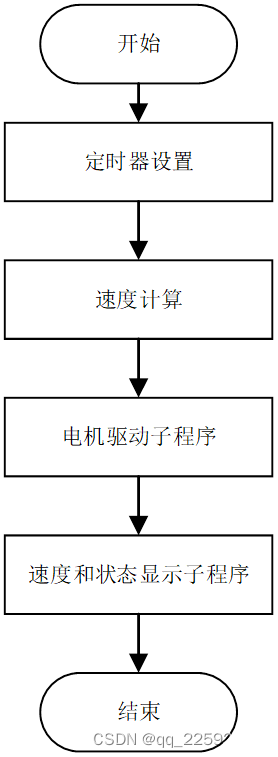
设计框架架构
设计说明书及设计文件
源码展示
#include "AT89X51.h" int delay(); void inti_lcd(); void show_lcd(int); void cmd_wr(); void ShowState(); void clock(unsigned int Delay) ; void DoSpeed(); //计算速度 //正转值 #define RIGHT_RUN 1 //反转值 #define LEFT_RUN 0 sbit RS=0xA0; sbit RW=0xA1; sbit E=0xA2; char SpeedChar[]="SPEED(n/min):"; char StateChar[]="RUN STATE:"; char STATE_CW[]="CW"; char STATE_CCW[]="CCW"; char SPEED[3]="050"; unsigned int RunSpeed=50; //速度 unsigned char RunState=RIGHT_RUN; //运行状态 main() { /*定时器设置*/ TMOD=0x66; //定时器0,1都为计数方式;方式2; EA=1; //开中断 TH0=0xff; //定时器0初值FFH; TL0=0xff; ET0=1; TR0=1; TH1=0xff; //定时器1初值FFH; TL1=0xff; ET1=1; TR1=1; IT0=1; //脉冲方式 EX0=1; //开外部中断0:加速 IT1=1; //脉冲方式 EX1=1; //开外部中断1:减速 inti_lcd(); DoSpeed(); ShowState(); while(1) { clock(RunSpeed); P0_1=P0_1^0x01; } } //定时器0中断程序:正转 void t_0(void) interrupt 1 { RunState=RIGHT_RUN; P0_0=1; P1=0x01; cmd_wr(); ShowState(); } //定时器1中断:反转 void t_1(void) interrupt 3 { RunState=LEFT_RUN; P0_0=0; P1=0x01; cmd_wr(); ShowState(); } //中断0:加速程序 void SpeedUp() interrupt 0 { if(RunSpeed>=12) RunSpeed=RunSpeed-2; DoSpeed(); P1=0x01; cmd_wr(); ShowState(); } //中断1:减速程序 void SpeedDowm() interrupt 2 { if(RunSpeed<=100) RunSpeed=RunSpeed+2; DoSpeed(); P1=0x01; cmd_wr(); ShowState(); } int delay() //判断LCD是否忙 { int a; start: RS=0; RW=1; E=0; for(a=0;a<2;a++); E=1; P1=0xff; if(P1_7==0) return 0; else goto start; } void inti_lcd() //设置LCD方式 { P1=0x38; cmd_wr(); delay(); P1=0x01; //清除 cmd_wr(); delay(); P1=0x0f; cmd_wr(); delay(); P1=0x06; cmd_wr(); delay(); P1=0x0c; cmd_wr(); delay(); } void cmd_wr() //写控制字 { RS=0; RW=0; E=0; E=1; } void show_lcd(int i) //LCD显示子程序 { P1=i; RS=1; RW=0; E=0; E=1; } void ShowState() //显示状态与速度 { int i=0; while(SpeedChar[i]!='\0') { delay(); show_lcd(SpeedChar[i]); i++; } delay(); P1=0x80 | 0x0d; cmd_wr(); i=0; while(SPEED[i]!='\0') { delay(); show_lcd(SPEED[i]); i++; } delay(); P1=0xC0; cmd_wr(); i=0; while(StateChar[i]!='\0') { delay(); show_lcd(StateChar[i]); i++; } delay(); P1=0xC0 | 0x0A; cmd_wr(); i=0; if(RunState==RIGHT_RUN) while(STATE_CW[i]!='\0') { delay(); show_lcd(STATE_CW[i]); i++; } else while(STATE_CCW[i]!='\0') { delay(); show_lcd(STATE_CCW[i]); i++; } } void clock(unsigned int Delay) //1ms延时程序 { unsigned int i; for(;Delay>0;Delay--) for(i=0;i<124;i++); } void DoSpeed() { SPEED[0]=(1000*6/RunSpeed/100)+48; SPEED[1]=1000*6/RunSpeed%100/10+48; SPEED[2]=1000*6/RunSpeed%10+48; }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
- 164
- 165
- 166
- 167
- 168
- 169
- 170
- 171
- 172
- 173
- 174
- 175
- 176
- 177
- 178
- 179
- 180
- 181
- 182
- 183
- 184
- 185
- 186
- 187
- 188
- 189
- 190
- 191
- 192
- 193
- 194
- 195
- 196
- 197
- 198
- 199
- 200
-
相关阅读:
安卓应用开发中的参数修改保存
基于数组寻址的SCL算法实现S7-1200_1500中的配方功能Recipe
曝一段十多年前的“情史”!
Docker容器-------数据卷和数据卷容器及cgroups资源限制
选出表中的中位数记录[构造左右边界 || 问题转换]
常用颜色的英文和十六进制
Java基础之-OOP面向对象
【Python】图像和办公文档的处理
【机器学习入门项目10例】(九):聚类算法用于降维,KMeans的矢量量化应用(图片压缩)
C++类和对象(上)
- 原文地址:https://blog.csdn.net/qq_22592979/article/details/128090935
