-
m低信噪比下GPS信号的捕获算法研究,分别使用matlab和FPGA对算法进行仿真和硬件实现
目录
1.算法概述
GPS卫星发送的信号一般由3个分量组成:载波、伪码和导航电文,其中伪码和导航电文采用BPSK技术去调制载波。GPS使用的两个L波段两种载频:

为了跟踪GPS信号,首先要捕获到GPS信号。将捕获到的GPS信号的数据传递给跟踪过程,再通过跟踪过程便可得到卫星的导航电文。传统的GPS捕获方法有:串行搜索捕获、滑动相关法、循环相关法、PMF算法。 采用分段FFT的方法进行运算,算法基本结构如图1所示。

这里分段数目为K,那么每个相关器的相关时间为TCA/K。每个相关器处理的C/A码长度为,然后再对处理后的数据进行FFT变换。由于每个FFT对应的点数仅仅为原来的,故其硬件资源较直接的并行FFT算法要节约。
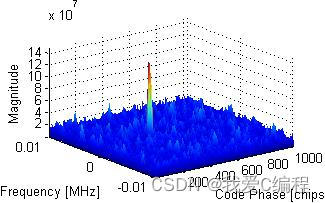
当接收机处于遮挡比较严重的环境如隧道,高楼林立的市区 GPS信号将变得非常微弱。根据经验,这种情况下,GPS信号的载噪比一般只有44dBhz,甚至更低。在这种情况下,获得的信号频谱非常差,甚至难以搜索到其峰值,因此,我们在检测信号最大值的时候,需要通过如下的运算,这里我们仍假设将信号分为K段进行FFT变化。

然后对得到的结果取模。当获得超过门限的峰值,则说明此时信号已经捕获,就得到对码相位和多普勒频移估计值,这样做的有点是可以获得峰值更为明显的谱线。
2.仿真效果预览
matlab2022a,ise10.1仿真


3.MATLAB/FPGA部分代码预览
- `timescale 1ns / 1ps
- module tops(
- i_clk,
- i_rst,
- o_CA,
- o_sin,
- o_cos,
- o_ca_cos,
- o_ca_som,
- o_sum1,
- o_sum2,
- o_ca_cos2,
- o_ca_som2,
- fft_in1,
- fft_in2,
- fft_out1,
- fft_out2
- );
- input i_clk;
- input i_rst;
- output signed[1:0] o_CA;
- output signed[7:0] o_sin;
- output signed[7:0] o_cos;
- output signed[9:0] o_ca_cos;
- output signed[9:0] o_ca_som;
- output signed[13:0]o_sum1;
- output signed[13:0]o_sum2;
- output signed[9:0] o_ca_cos2;
- output signed[9:0] o_ca_som2;
- output signed[23:0]fft_in1;
- output signed[23:0]fft_in2;
- output signed[27:0]fft_out1;
- output signed[27:0]fft_out2;
- CA_carrier_module CA_carrier_module_u(
- .i_clk (i_clk),
- .i_rst (i_rst),
- .o_CA (),
- .o_sin (),
- .o_cos (),
- .o_ca_cos (o_ca_cos),
- .o_ca_sin (o_ca_sin)
- );
- wire signed[13:0]o_sum1;
- wire signed[13:0]o_sum2;
- delay_1ms delay_1ms_u1(
- .i_clk (i_clk),
- .i_rst (i_rst),
- .i_data (o_ca_cos),
- .o_data1 (),
- .o_data2 (),
- .o_data3 (),
- .o_data4 (),
- .o_data5 (),
- .o_data6 (),
- .o_data7 (),
- .o_data8 (),
- .o_data9 (),
- .o_data10 (),
- .o_sum (o_sum1)
- );
- delay_1ms delay_1ms_u2(
- .i_clk (i_clk),
- .i_rst (i_rst),
- .i_data (o_ca_sin),
- .o_data1 (),
- .o_data2 (),
- .o_data3 (),
- .o_data4 (),
- .o_data5 (),
- .o_data6 (),
- .o_data7 (),
- .o_data8 (),
- .o_data9 (),
- .o_data10 (),
- .o_sum (o_sum2)
- );
- reg[1:0]cnt1 = 2'b00;
- wire clk2;
- always @(posedge i_clk or posedge i_rst)
- begin
- if(i_rst)
- cnt1 <= 2'b00;
- else begin
- cnt1 <= cnt1 + 1'b1;
- end
- end
- assign clk2 = cnt1[1];
- CA_gen CA_gen_u(
- .i_clk (clk2),
- .i_rst (i_rst),
- .o_CA (o_CA)
- );
- ncos ncos_u(
- .reg_select (1'b0),
- .clk (i_clk),
- .we (1'b1),
- .data (26'd16777216),
- .sine (o_sin),
- .cosine (o_cos)
- );
- multer multer_u1(
- .clk (i_clk),
- .a (o_cos),
- .b (o_CA),
- .p (o_ca_cos2)
- );
- multer multer_u2(
- .clk (i_clk),
- .a (o_sin),
- .b (o_CA),
- .p (o_ca_sin2)
- );
- wire [23:0]fft_in1;
- wire [23:0]fft_in2;
- multer2 multer2_u1(
- .clk (i_clk),
- .a (o_sum1),
- .b (o_ca_cos2),
- .p (fft_in1)
- );
- multer2 multer2_u2(
- .clk (i_clk),
- .a (o_sum2),
- .b (o_ca_sin2),
- .p (fft_in2)
- );
- //==============fft==========================
- ffts ffts_u1(
- .sclr (i_rst),
- .fd_in (1'b1),
- .fd_out (),
- .forward (1'b1),//1;fft;0:ifft
- .clk (i_clk),
- .rffd (),
- .data_valid (),
- .dout (fft_out1),
- .din (fft_in1),
- .size (6'd31)
- );
- ffts ffts_u2(
- .sclr (i_rst),
- .fd_in (1'b1),
- .fd_out (),
- .forward (1'b1),//1;fft;0:ifft
- .clk (i_clk),
- .rffd (),
- .data_valid (),
- .dout (fft_out2),
- .din (fft_in2),
- .size (6'd31)
- );
- wire signed[13:0]omax1;
- wire [9:0]index;
- reg signed[13:0]o_power_average=14'd550;
- reg signed[22:0]r_power_average=23'd281600;
- always @(posedge i_clk or posedge i_rst)
- begin
- if(i_rst)
- begin
- o_power_average <= 14'd550;
- r_power_average <= 23'd281600;
- end
- else begin
- if(omax1[13] == 1'b1 | omax1==14'd0)
- o_power_average <= 14'd550;
- else begin
- r_power_average <= 172*omax1;
- o_power_average <= r_power_average[22:9];
- end
- end
- end
- find_max find_max_u(
- .clk (i_clk),
- .rst (i_rst), //同步复位
- .idata (o_fadd),
- .iTh1 (o_power_average),
- .omax1 (omax1),
- .oindex1(index),
- .omax2 (),
- .oindex2(),
- .omax3 (),
- .oindex3(),
- .oen (),
- .oen1 (),
- .start ()
- );
- endmodule
- 01_026_m
4.完整MATLAB/FPGA程序
V
-
相关阅读:
CentOS:7 源码安装zeek
JavaScript前端精确配置设置与监听器使用
nginx指定prefix路径启动
提高Python并发性能 - asyncio/aiohttp介绍
时序预测 | MATLAB实现MLP多层感知机时间序列预测
map和set的使用
MySQL INNER JOIN:内连接查询
SAP Fiori应用索引大全工具和 SAP Fiori Tools 的使用介绍
基于JAVA-旅游产品销售管理-演示录像2020计算机毕业设计源码+系统+mysql数据库+lw文档+部署
webpack优化策略
- 原文地址:https://blog.csdn.net/hlayumi1234567/article/details/127937383
