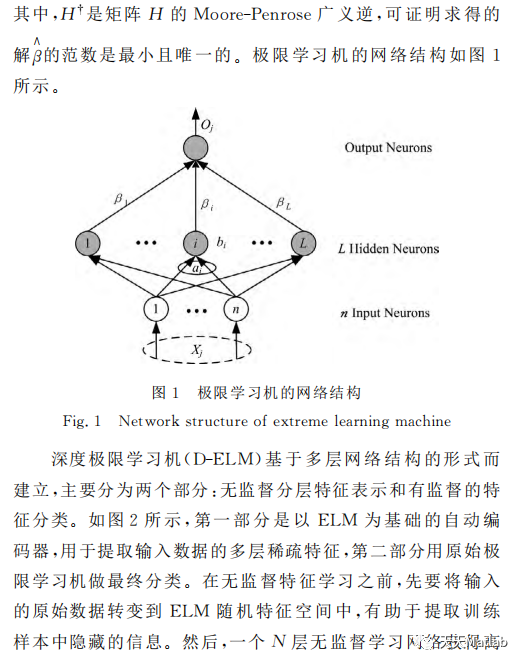
-
【预测模型-DELM分类】基于风驱动算法改进深度学习极限学习机实现数据分类附matlab代码
✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,matlab项目合作可私信。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知。
更多Matlab仿真内容点击👇
⛄ 内容介绍
人工时间的最大缺点是训练太长,因为它在应用神经网络的时间范围内,持续不断地限制神经网络,最大限度地限制学习机(Extreme Learning Machine)大量的噪声噪声,或者当输入数据时的维度算法非常高时,极限学习时的综合性能会受到极大的影响。进行空间映射时的有效对数据维的维度的预测,因此我们认为利用深度学习的预测精度来最大学习机的特性,可以很好地改善极限学习机的特性。本文采用风驱动算法的进一步优化DELM超参数,仿真结果改进,预测精度更高。




⛄ 部分代码
%-------------------------------------------------------------------------
tic;
clear;
close all;
clc;
format long g;
delete('WDOoutput.txt');
delete('WDOpressure.txt');
delete('WDOposition.txt');
fid=fopen('WDOoutput.txt','a');
%--------------------------------------------------------------
% User defined WDO parameters:
param.popsize = 20; % population size.
param.npar = 5; % Dimension of the problem.
param.maxit = 500; % Maximum number of iterations.
param.RT = 3; % RT coefficient.
param.g = 0.2; % gravitational constant.
param.alp = 0.4; % constants in the update eq.
param.c = 0.4; % coriolis effect.
maxV = 0.3; % maximum allowed speed.
dimMin = -5; % Lower dimension boundary.
dimMax= 5; % Upper dimension boundary.
%---------------------------------------------------------------
% Initialize WDO population, position and velocity:
% Randomize population in the range of [-1, 1]:
pos = 2*(rand(param.popsize,param.npar)-0.5);
% Randomize velocity:
vel = maxV * 2 * (rand(param.popsize,param.npar)-0.5);
%---------------------------------------------------------------
% Evaluate initial population: (Sphere Function)
for K=1:param.popsize,
x = (dimMax - dimMin) * ((pos(K,:)+1)./2) + dimMin;
pres(K,:) = sum (x.^2);
end
%----------------------------------------------------------------
% Finding best air parcel in the initial population :
[globalpres,indx] = min(pres);
globalpos = pos(indx,:);
minpres(1) = min(pres); % minimum pressure
%-----------------------------------------------------------------
% Rank the air parcels:
[sorted_pres rank_ind] = sort(pres);
% Sort the air parcels:
pos = pos(rank_ind,:);
keepglob(1) = globalpres;
%-----------------------------------------------------------------
% Start iterations :
iter = 1; % iteration counter
for ij = 2:param.maxit,
% Update the velocity:
for i=1:param.popsize
% choose random dimensions:
a = randperm(param.npar);
% choose velocity based on random dimension:
velot(i,:) = vel(i,a);
vel(i,:) = (1-param.alp)*vel(i,:)-(param.g*pos(i,:))+ ...
abs(1-1/i)*((globalpos-pos(i,:)).*param.RT)+ ...
(param.c*velot(i,:)/i);
end
% Check velocity:
vel = min(vel, maxV);
vel = max(vel, -maxV);
% Update air parcel positions:
pos = pos + vel;
pos = min(pos, 1.0);
pos = max(pos, -1.0);
% Evaluate population: (Pressure)
for K=1:param.popsize,
x = (dimMax - dimMin) * ((pos(K,:)+1)./2) + dimMin;
pres(K,:) = sum (x.^2);
end
%----------------------------------------------------
% Finding best particle in population
[minpres,indx] = min(pres);
minpos = pos(indx,:); % min location for this iteration
%----------------------------------------------------
% Rank the air parcels:
[sorted_pres rank_ind] = sort(pres);
% Sort the air parcels position, velocity and pressure:
pos = pos(rank_ind,:);
vel = vel(rank_ind,:);
pres = sorted_pres;
% Updating the global best:
better = minpres < globalpres;
if better
globalpres = minpres % initialize global minimum
globalpos = minpos;
end
% Keep a record of the progress:
keepglob(ij) = globalpres;
save WDOposition.txt pos -ascii -tabs;
end
%Save values to the final file.
pressure = transpose(keepglob);
save WDOpressure.txt pressure -ascii -tabs;
% Plot the pressure function progress over iterations:
semilogy(keepglob, 'k' ,'LineWidth',2)
title(['Global Best Pressure is " ',num2str(keepglob(1,param.maxit)),' ".'])
xlabel('Number of Iterations')
ylabel('Global Pressure (i.e. fitness) in log scale')
grid on
xlim([0, param.maxit])
%END
%-----------------------------------------------------
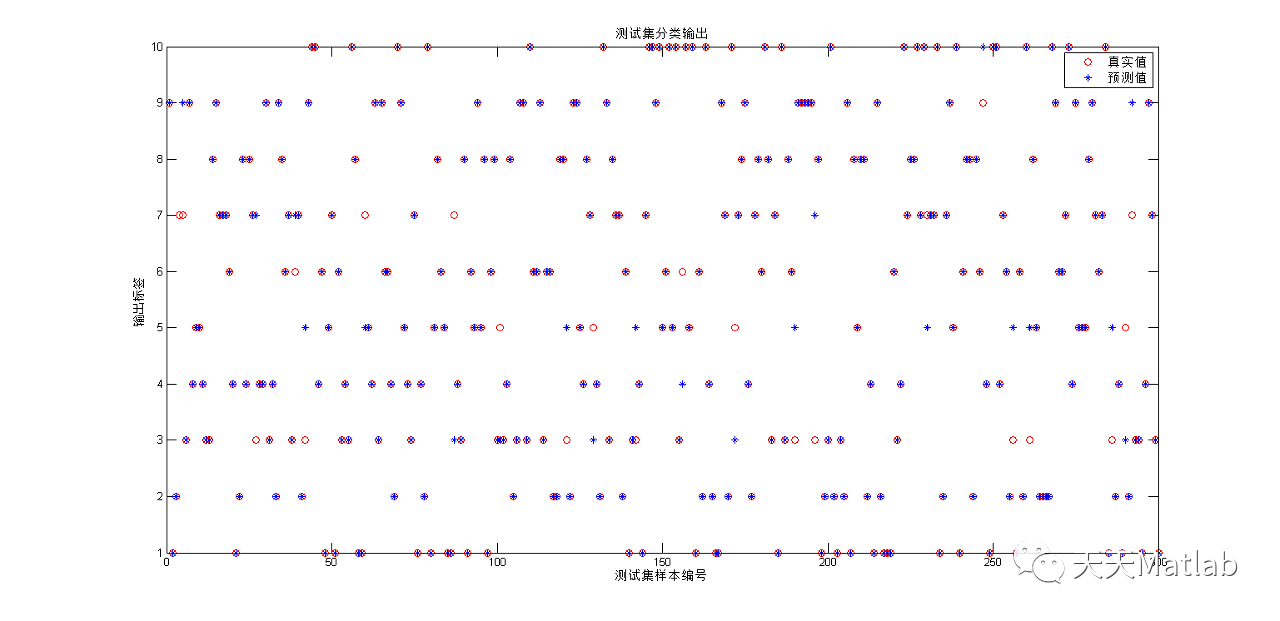
⛄ 运行结果

⛄ 参考文献
[1]吴丁杰, 温立书. 一种基于哈里斯鹰算法优化的核极限学习机[J]. 信息通信, 2021(034-011).
[2]马萌萌. 基于深度学习的极限学习机算法研究[D]. 中国海洋大学, 2016.
❤️ 关注我领取海量matlab电子书和数学建模资料
❤️部分理论引用网络文献,若有侵权联系博主删除
-
相关阅读:
Python语法
软考 系统架构设计师系列知识点之数字孪生体(4)
Windows10环境gradle安装与配置
CH34X系列与CH91XX系列等USB转串口方案选型对比
PHP 反序列化漏洞:手写序列化文本
equals与==判断相等
Python 机器学习 | 超参数优化 黑盒(Black-Box)非凸优化技术实践
【重识云原生】第六章容器6.1.2节——容器安装部署
Scss--@mixin--使用/实例
高颜值markdown解析器:粘贴复制代码即可用(不用编译打包)
- 原文地址:https://blog.csdn.net/matlab_dingdang/article/details/127460008