-
【细节分析 | 代码讲解】Vision Transformer
论文地址:https://arxiv.org/pdf/2010.11929.pdf
声明
本文来源于 Reference 列出的大佬讲解,以及部分碎片知识,仅供本人学习并在后期有新的感悟进行知识更新,再此表达对大佬最诚挚的敬意,如有侵权,本人立即删除!
一、引言
- transformer 中首先需要将字符分词后转化为数字,然后每个词用一个向量表示,那么图片呢?

-
将像素点展平后就是一系列数据了,序列⻓度 = 224*224 = 50176,而 BERT 的最⼤⻓度是 512,相当于 100 倍,不可取。
解决:
- 图⽚切分为 Patch
- Patch 转化为 embedding
- Position embedding 和 token embedding 相加
- 输⼊到模型中
- CLS 输出做多分类任务


- 在整合最后输出信息的时候,有多种⽅式:⼀种是使⽤
CLS token,另⼀种就是对所有tokens的输出做⼀个平均
- 为什么需要位置编码?
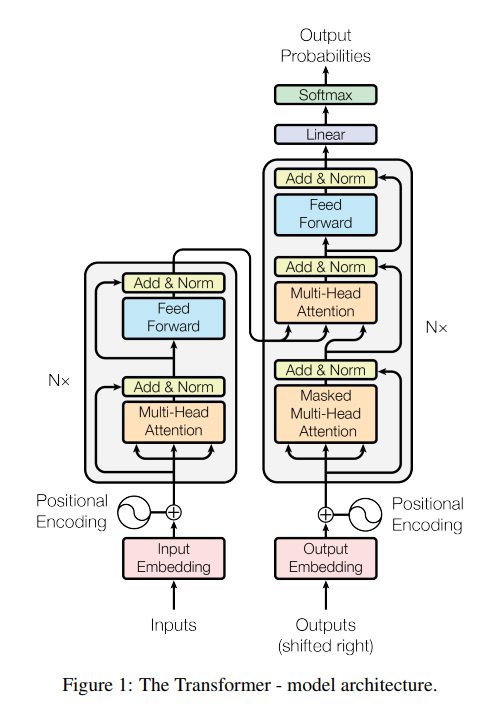
RNN 考虑了输入时序的问题,而注意力机制是并行输入,不存在时许问题,不融入位置关系就会导致,比如 我 爱 你, 我 你 爱, 爱 我 你 等不同顺序输入后输出相同的结果。 - VIT 与 Transformer 结构有何不同
Transformer 中在多头注意力以及前馈神经网络之后做 LN, 而 VIT 是在之前做 LN

二、模型详解
-
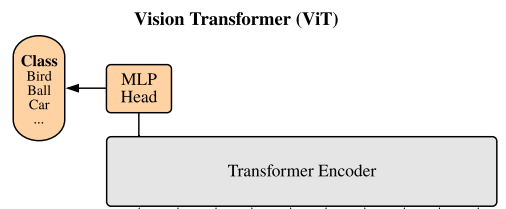
模型由三个模块组成:
- Linear Projection of Flattened Patches (Embedding层)
- Transformer Encoder (图右侧有给出更加详细的结构)
- MLP Head(最终用于分类的层结构)

-
Embedding 层结构详解
对于标准的 Transformer 模块,要求输入的是 token(向量)序列,即二维矩阵 [num_token, token_dim],如下图,token0-9 对应的都是向量,以 ViT-B/16 为例,每个 token 向量长度为 768。

对于图像数据而言,其数据格式为[H, W, C]是三维矩阵明显不是 Transformer 想要的。所以需要先通过一个Embedding 层来对数据做个变换。如下图所示,首先将一张图片按给定大小分成一堆 Patches。以 ViT-B/16 为例,将输入图片(224x224)按照16x16大小的 Patch 进行划分,划分后会得到 ( 224 / 16 ) 2 = 196 个 Patches。接着通过线性映射将每个 Patch 映射到一维向量中,以 ViT-B/16 为例,每个 Patche 数据 shape 为[16, 16, 3]通过映射得到一个长度为 768 的向量(后面都直接称为 token )。[16, 16, 3] -> [768]在代码实现中,直接通过一个卷积层来实现。 以 ViT-B/16 为例,直接使用一个卷积核大小为
16x16,步距为16,卷积核个数为768的卷积来实现。通过卷积[224, 224, 3] -> [14, 14, 768],然后把 H 以及 W 两个维度展平即可[14, 14, 768] -> [196, 768],此时正好变成了一个二维矩阵,正是 Transformer 想要的。在输入 Transformer Encoder 之前注意需要加上 [class] token 以及 Position Embedding。 在原论文中,作者说参考 BERT,在刚刚得到的一堆 tokens 中插入一个专门用于分类的 [class] token,这个 [class] token 是一个可训练的参数,数据格式和其他 token 一样都是一个向量,以 ViT-B/16 为例,就是一个长度为 768 的向量,与之前从图片中生成的 tokens 拼接在一起,
Cat([1, 768], [196, 768]) -> [197, 768]。然后关于 Position Embedding 就是之前 Transformer 中讲到的 Positional Encoding,这里的 Position Embedding 采用的是一个可训练的参数(1D Pos. Emb.),是直接叠加在 tokens 上的(add),所以 shape 要一样。以 ViT-B/16 为例,刚刚拼接 [class] token 后 shape 是 [197, 768],那么这里的 Position Embedding 的 shape 也是[197, 768]。

对于 Position Embedding 作者也有做一系列对比试验,在源码中默认使用的是1D Pos. Emb.,对比不使用 Position Embedding 准确率提升了大概3个点,和2D Pos. Emb.比起来没太大差别。

Patch 代码实现
class PatchEmbed(nn.Module): """ 2D Image to Patch Embedding """ def __init__(self, img_size=224, patch_size=16, in_c=3, embed_dim=768, norm_layer=None): super().__init__() img_size = (img_size, img_size) # 224 × 224 patch_size = (patch_size, patch_size) # 16 × 16 self.img_size = img_size self.patch_size = patch_size self.grid_size = (img_size[0] // patch_size[0], img_size[1] // patch_size[1]) # (14 × 14) self.num_patches = self.grid_size[0] * self.grid_size[1] # 196 self.proj = nn.Conv2d(in_c, embed_dim, kernel_size=patch_size, stride=patch_size) # 3,768(卷积核个数),核大小为 16 × 16,步幅 16 -> B × 14 × 14 × 768 self.norm = norm_layer(embed_dim) if norm_layer else nn.Identity() # 判断是否进行 LN ,Identity:不执行 def forward(self, x): B, C, H, W = x.shape #(B, 3, 224, 224) assert H == self.img_size[0] and W == self.img_size[1], \ f"Input image size ({H}*{W}) doesn't match model ({self.img_size[0]}*{self.img_size[1]})." # flatten: [B, C, H, W] -> [B, C, HW] # transpose: [B, C, HW] -> [B, HW, C] () x = self.proj(x).flatten(2).transpose(1, 2) # B × 14 × 14 × 768 -> B × 196 × 768 x = self.norm(x) return x- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
-
Transformer Encoder详解
Transformer Encoder 其实就是重复堆叠 Encoder Block L 次,下图是 [1] 作者绘制的Encoder Block,主要由以下几部分组成:
- Layer Norm,这种 Normalization 方法主要是针对 NLP 领域提出的,这里是对每个 token 进行 Norm 处理,之前也有讲过 Layer Norm 不懂的可以参考链接
- Multi-Head Attention,这个结构之前在讲 Transformer 中很详细的讲过,不在赘述,不了解的可以参考链接
- Dropout/DropPath,在原论文的代码中是直接使用的 Dropout 层,在但rwightman 实现的代码中使用的是 DropPath(stochastic depth),可能后者会更好一点。
- MLP Block,如图右侧所示,就是 全连接 + GELU 激活函数 + Dropout 组成也非常简单,需要注意的是第一个全连接层会把输入节点个数翻 4 倍 [
197, 768] -> [197, 3072],第二个全连接层会还原回原节点个数[197, 3072] -> [197, 768]

Attention 代码实现
class Attention(nn.Module): def __init__(self, dim, # 输入token的dim num_heads=8, qkv_bias=False, qk_scale=None, attn_drop_ratio=0., proj_drop_ratio=0.): super(Attention, self).__init__() self.num_heads = num_heads # 8 head_dim = dim // num_heads # 96 self.scale = qk_scale or head_dim ** -0.5 # 特征缩放 self.qkv = nn.Linear(dim, dim * 3, bias=qkv_bias) # 3 × dim 的维度一次产生 Q K V 的三个权重矩阵 self.attn_drop = nn.Dropout(attn_drop_ratio) self.proj = nn.Linear(dim, dim) self.proj_drop = nn.Dropout(proj_drop_ratio) def forward(self, x): # [batch_size, num_patches + 1, total_embed_dim] B, N, C = x.shape # [B, 197, 768] # qkv(): -> [batch_size, num_patches + 1, 3 * total_embed_dim] -> [B, 197, 3 * 768] # reshape: -> [batch_size, num_patches + 1, 3, num_heads, embed_dim_per_head] -> [B, 197, 3 , 8, 288] # permute: -> [3, batch_size, num_heads, num_patches + 1, embed_dim_per_head] -> [3, B, 8, 197, 288] qkv = self.qkv(x).reshape(B, N, 3, self.num_heads, C // self.num_heads).permute(2, 0, 3, 1, 4) # [batch_size, num_heads, num_patches + 1, embed_dim_per_head] q, k, v = qkv[0], qkv[1], qkv[2] # make torchscript happy (cannot use tensor as tuple) [B, 8, 197, 288] # transpose: -> [batch_size, num_heads, embed_dim_per_head, num_patches + 1] # @: multiply -> [batch_size, num_heads, num_patches + 1, num_patches + 1] attn = (q @ k.transpose(-2, -1)) * self.scale # Q * k^T 再放缩 attn = attn.softmax(dim=-1) attn = self.attn_drop(attn) # @: multiply -> [batch_size, num_heads, num_patches + 1, embed_dim_per_head] # transpose: -> [batch_size, num_patches + 1, num_heads, embed_dim_per_head] # reshape: -> [batch_size, num_patches + 1, total_embed_dim] x = (attn @ v).transpose(1, 2).reshape(B, N, C) # 转置后和并最后两个维度 x = self.proj(x) # 连接线性层 [B, 197, 768] x = self.proj_drop(x) return x- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
图中的 Encoder block 代码实现
class Block(nn.Module): def __init__(self, dim, num_heads, mlp_ratio=4., qkv_bias=False, qk_scale=None, drop_ratio=0., attn_drop_ratio=0., drop_path_ratio=0., act_layer=nn.GELU, norm_layer=nn.LayerNorm): super(Block, self).__init__() self.norm1 = norm_layer(dim) # self.attn = Attention(dim, num_heads=num_heads, qkv_bias=qkv_bias, qk_scale=qk_scale, attn_drop_ratio=attn_drop_ratio, proj_drop_ratio=drop_ratio) # NOTE: drop path for stochastic depth, we shall see if this is better than dropout here self.drop_path = DropPath(drop_path_ratio) if drop_path_ratio > 0. else nn.Identity() self.norm2 = norm_layer(dim) mlp_hidden_dim = int(dim * mlp_ratio) self.mlp = Mlp(in_features=dim, hidden_features=mlp_hidden_dim, act_layer=act_layer, drop=drop_ratio) def forward(self, x): x = x + self.drop_path(self.attn(self.norm1(x))) # 先 LN 再做 注意力,再残差连接 x = x + self.drop_path(self.mlp(self.norm2(x))) # 然后再做 LN, 前馈, 再残差 return x- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
-
MLP Head 详解
上面通过 Transformer Encoder 后输出的 shape 和输入的 shape 是保持不变的,以 ViT-B/16 为例,输入的是[197, 768] 输出的还是[197, 768]。注意,在 Transformer Encoder 后其实还有一个Layer Norm没有画出来,后面有作者 [1] 画的 ViT 的模型可以看到详细结构。这里只需要分类的信息,所以只需要提取出[class] token生成的对应结果就行,即 [197, 768] 中抽取出[class] token对应的[1, 768]。接着我们通过 MLP Head 得到我们最终的分类结果。MLP Head 原论文中说在训练 ImageNet21K 时是由 Linear+tanh 激活函数 + Linear 组成。但是迁移到ImageNet1K 上或者你自己的数据上时,只用一个 Linear 即可。
MLP 代码实现
class Mlp(nn.Module): """ MLP as used in Vision Transformer, MLP-Mixer and related networks """ def __init__(self, in_features, hidden_features=None, out_features=None, act_layer=nn.GELU, drop=0.): super().__init__() out_features = out_features or in_features hidden_features = hidden_features or in_features self.fc1 = nn.Linear(in_features, hidden_features) # 第一层 self.act = act_layer() # 激活函数 self.fc2 = nn.Linear(hidden_features, out_features) # 第二层 self.drop = nn.Dropout(drop) def forward(self, x): x = self.fc1(x) x = self.act(x) x = self.drop(x) x = self.fc2(x) x = self.drop(x) return x- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
综上处理后 Vision Transformer 代码实现
class VisionTransformer(nn.Module): def __init__(self, img_size=224, patch_size=16, in_c=3, num_classes=1000, embed_dim=768, depth=12, num_heads=12, mlp_ratio=4.0, qkv_bias=True, qk_scale=None, representation_size=None, distilled=False, drop_ratio=0., attn_drop_ratio=0., drop_path_ratio=0., embed_layer=PatchEmbed, norm_layer=None, act_layer=None): """ Args: img_size (int, tuple): input image size patch_size (int, tuple): patch size in_c (int): number of input channels num_classes (int): number of classes for classification head embed_dim (int): embedding dimension depth (int): depth of transformer num_heads (int): number of attention heads mlp_ratio (int): ratio of mlp hidden dim to embedding dim qkv_bias (bool): enable bias for qkv if True qk_scale (float): override default qk scale of head_dim ** -0.5 if set representation_size (Optional[int]): enable and set representation layer (pre-logits) to this value if set distilled (bool): model includes a distillation token and head as in DeiT models drop_ratio (float): dropout rate attn_drop_ratio (float): attention dropout rate drop_path_ratio (float): stochastic depth rate embed_layer (nn.Module): patch embedding layer norm_layer: (nn.Module): normalization layer """ super(VisionTransformer, self).__init__() self.num_classes = num_classes # 分类类别 self.num_features = self.embed_dim = embed_dim # 768 self.num_tokens = 2 if distilled else 1 # 1 norm_layer = norm_layer or partial(nn.LayerNorm, eps=1e-6) # LN act_layer = act_layer or nn.GELU self.patch_embed = embed_layer(img_size=img_size, patch_size=patch_size, in_c=in_c, embed_dim=embed_dim) # PatchEmbed 类构建[B, 196, 768] num_patches = self.patch_embed.num_patches self.cls_token = nn.Parameter(torch.zeros(1, 1, embed_dim)) # 构建 [B, 1, 768] 的可训练参数 self.dist_token = nn.Parameter(torch.zeros(1, 1, embed_dim)) if distilled else None self.pos_embed = nn.Parameter(torch.zeros(1, num_patches + self.num_tokens, embed_dim)) # [B, 197, 768],与前面进行对应 self.pos_drop = nn.Dropout(p=drop_ratio) dpr = [x.item() for x in torch.linspace(0, drop_path_ratio, depth)] # stochastic depth decay rule self.blocks = nn.Sequential(*[ Block(dim=embed_dim, num_heads=num_heads, mlp_ratio=mlp_ratio, qkv_bias=qkv_bias, qk_scale=qk_scale, drop_ratio=drop_ratio, attn_drop_ratio=attn_drop_ratio, drop_path_ratio=dpr[i], norm_layer=norm_layer, act_layer=act_layer) for i in range(depth) ]) # depth : 对 blocks 进行堆叠 self.norm = norm_layer(embed_dim) # Representation layer # 这步不用管 if representation_size and not distilled: self.has_logits = True self.num_features = representation_size self.pre_logits = nn.Sequential(OrderedDict([ ("fc", nn.Linear(embed_dim, representation_size)), ("act", nn.Tanh()) ])) else: self.has_logits = False self.pre_logits = nn.Identity() # Classifier head(s) self.head = nn.Linear(self.num_features, num_classes) if num_classes > 0 else nn.Identity() self.head_dist = None if distilled: self.head_dist = nn.Linear(self.embed_dim, self.num_classes) if num_classes > 0 else nn.Identity() # Weight init nn.init.trunc_normal_(self.pos_embed, std=0.02) if self.dist_token is not None: nn.init.trunc_normal_(self.dist_token, std=0.02) nn.init.trunc_normal_(self.cls_token, std=0.02) self.apply(_init_vit_weights) def forward_features(self, x): # [B, C, H, W] -> [B, num_patches, embed_dim] x = self.patch_embed(x) # [B, 196, 768] # [1, 1, 768] -> [B, 1, 768] cls_token = self.cls_token.expand(x.shape[0], -1, -1) # 复制 B 份 if self.dist_token is None: x = torch.cat((cls_token, x), dim=1) # [B, 197, 768] else: x = torch.cat((cls_token, self.dist_token.expand(x.shape[0], -1, -1), x), dim=1) x = self.pos_drop(x + self.pos_embed) # self.pos_embed 位置编码 与 x 相加 [B, 197, 768] x = self.blocks(x) # [B, 197, 768] x = self.norm(x) # [B, 197, 768] if self.dist_token is None: return self.pre_logits(x[:, 0]) # x[:, 0] 切片提取前面部分 else: return x[:, 0], x[:, 1] def forward(self, x): x = self.forward_features(x) # 提取到 CLS 后 if self.head_dist is not None: x, x_dist = self.head(x[0]), self.head_dist(x[1]) if self.training and not torch.jit.is_scripting(): # during inference, return the average of both classifier predictions return x, x_dist else: return (x + x_dist) / 2 else: x = self.head(x) # 全连接得到多分类的输出 return x- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
Vision Transformer 网络结构细节回顾

Reference
[1] Vision Transformer 详解
[2] Vision Transformer(ViT)PyTorch代码全解析(附图解) -
相关阅读:
Dubbo详解,用心看这一篇文章就够了【重点】
使用python计算行列式
Stable Diffusion 手动安装扩展报错 catch exception for non git extensions
自监督DINO论文笔记
ffmpeg 时间相关--时间基,timebase,pts,dts,duration
Vite: 双构建引擎- Esbuild和Rollup
[Linux]----进程间通信之管道通信
华北理工大学计算机考研资料汇总
通过篡改cred结构体实现提权利用
关于生命周期的面试题vue
- 原文地址:https://blog.csdn.net/qq_46450354/article/details/126809626
