-
9月3日关键点检测学习笔记——图像识别与检测
前言
本文为9月3日关键点检测学习笔记——图像识别与检测,分为三个章节:
- 特征;
- 目标定位与检测;
- Pytorch 搭建 CNN。
一、特征
1、颜色特征

2、形状特征

3、纹理特征

二、目标定位与检测
检测 = 多目标定位。
1、目标定位 Object Localization
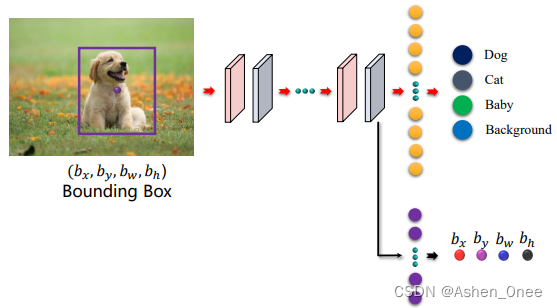

- y = [ P c , b x , b y , b w , b h , C 1 , C 2 , C 3 ] T y = [P_c, b_x, b_y, b_w, b_h, C_1, C_2, C_3]^T y=[Pc,bx,by,bw,bh,C1,C2,C3]T;
- P c P_c Pc:0 或 1,判断是背景还是 object,背景为 0;
- C C C:分类;
- Loss:
L
(
y
^
−
y
)
=
{
(
P
c
^
−
P
c
)
2
+
(
b
x
^
−
b
x
)
2
+
…
+
(
C
3
^
−
C
3
)
2
i
f
P
c
=
1
(
P
c
^
−
P
c
)
2
i
f
P
c
=
0
L(\hat{y} - y) = \left\{\right. L(y^−y)={(Pc^−Pc)2+(bx^−bx)2+…+(C3^−C3)2if Pc=1(Pc^−Pc)2if Pc=0。
( P c ^ − P c ) 2 + ( b x ^ − b x ) 2 + … + ( C 3 ^ − C 3 ) 2 i f P c = 1 ( P c ^ − P c ) 2 i f P c = 0
(1)、One Class CNN
一个窗口 ⇒ 检测一个类别。

(2)、Two Classes CNN

-
IoU:

-
Anchor:
- Anchor Box 1: y = [ P c , b x , b y , b w , b h , C 1 , C 2 , C 3 ] T y = [P_c, b_x, b_y, b_w, b_h, C_1, C_2, C_3]^T y=[Pc,bx,by,bw,bh,C1,C2,C3]T;
- Anchor Box 2: y = [ P c , b x , b y , b w , b h , C 1 , C 2 , C 3 , P c , b x , b y , b w , b h , C 1 , C 2 , C 3 ] T y = [P_c, b_x, b_y, b_w, b_h, C_1, C_2, C_3, P_c, b_x, b_y, b_w, b_h, C_1, C_2, C_3]^T y=[Pc,bx,by,bw,bh,C1,C2,C3,Pc,bx,by,bw,bh,C1,C2,C3]T.

2、目标识别 Object detection
分类问题。
(1)、One-stage
- **Single-Shot Detector: **
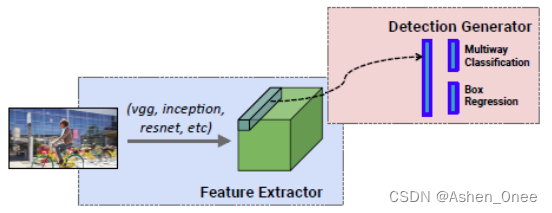
(2)、Two-stage
- Faster R-CNN:

3、目标检测
分类 + 定位。
三、Pytorch 搭建 CNN
# 使用 Cifar 数据集 import numpy as np import torch, torchvision import torch.nn as nn import torch.nn.functional as F from torchvision import datasets import torchvision.transforms as transformers print(torch.__version__) # 1. Import & preprocess dataset ''' - 计算数据的均值和标准差,然后 normalization; - 需要分别计算 RGB 三个通道的均值和标准差; - 传入元组,返回列表。 ''' ROOT = './data' train_data = datasets.CIFAR10(root=ROOT, train=True, download=True) # means = train_data.mean(axis=(0, 1, 2)) / 255 # stds = train_data.std(axis=(0, 1, 2)) / 255 # # print(f'Calculated means: {means}') # print(f'Calculated stds: {stds}') train_transformers = transformers.Compose([ transformers.RandomRotation(5), transformers.RandomHorizontalFlip(0.5), transformers.RandomCrop(32, padding=2), transformers.ToTensor(), transformers.Normalize(mean=[0.4914, 0.4812, 0.4465], std=[0.2470, 0.2435, 0.2616]) ]) test_transformers = transformers.Compose([ transformers.ToTensor(), transformers.Normalize(mean=[0.4914, 0.4812, 0.4465], std=[0.2470, 0.2435, 0.2616]) ]) train_dataset = datasets.CIFAR10(ROOT, train=True, download=True, transform=train_transformers) test_dataset = datasets.CIFAR10(ROOT, train=False, download=True, transform=test_transformers) # 2. 搭建 CNN 网络并训练 # Data loaders train_loader = torch.utils.data.DataLoader(train_dataset, batch_size=128, shuffle=True) test_loader = torch.utils.data.DataLoader(train_dataset, batch_size=128, shuffle=False) # CNN class net(nn.Module): def __init__(self, input_dim, num_filters, kernel_size, stride, padding, num_classes): super(net, self).__init__() self.input_dim = input_dim conv_output_size = int((input_dim - kernel_size + 2 * padding) / stride) + 1 # 卷积层输出尺寸 pool_output_size = int((conv_output_size - kernel_size) / stride) + 1 # 池化层输出尺寸 self.conv = nn.Conv2d(3, num_filters, kernel_size=kernel_size, stride=stride, padding=padding) self.pool = nn.MaxPool2d(kernel_size=kernel_size, stride=stride) self.relu = nn.ReLU() self.dense = nn.Linear(pool_output_size * pool_output_size * num_filters, num_classes) def forward(self, x): x = self.conv(x) x = self.relu(x) x = self.pool(x) x = x.view(x.size(0), -1) # resize to fit into final dense layer x = self.dense(x) return x # 超参数 DEVICE = torch.device('cuda') INPUT_DIM = 32 NUM_FILTERS = 32 KERNEL_SIZE = 3 STRIDE = 1 PADDING = 1 NUM_CLASSES = 10 LEARNING_RATE = 1e-3 NUM_EPOCHS = 30 model = net(INPUT_DIM, NUM_FILTERS, KERNEL_SIZE, STRIDE, PADDING, NUM_CLASSES).to(DEVICE) criterion = nn.CrossEntropyLoss() # 不需要调用 softmax,已包含在内 optimizer = torch.optim.Adam(model.parameters(), lr=LEARNING_RATE) # 训练模型 for i in range(NUM_EPOCHS): temp_loss = [] for (x, y) in train_loader: x, y = x.float().to(DEVICE), y.to(DEVICE) outputs = model(x) loss = criterion(outputs, y) # print(loss.type) ''' .item(): - 以列表返回可遍历的(键, 值) 元组数组; - 可用于 for 循环遍历; - 把字典中每对 key 和 value 组成一个元组,并把这些元组放在列表中返回. ''' temp_loss.append(loss.item()) optimizer.zero_grad() loss.backward() optimizer.step() print("Loss at {}th epoch: {}".format(i, np.mean(temp_loss))) # 3. Evaluation y_pred, y_true = [], [] with torch.no_grad(): for x, y in test_loader: x, y = x.float().to(DEVICE), y.to(DEVICE) outputs = F.softmax(model(x)).max(1)[-1] # 预测的 label y_true += list(y.numpy()) y_pred += list(outputs.numpy()) # 评估结果 from sklearn.metrics import accuracy_score print(accuracy_score(y_true, y_pred)) >>> …… >>> Loss at 29th epoch: 1.006340386312636 >>> 0.66006- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
-
相关阅读:
爬虫----js逆向某宝h5的sign参数
MATLAB作图颜色
Go Web——Beego之controller其他相关知识
【和小白一起练习CTF】攻防世界:web基础练习题(1)
电脑盘符错乱,C盘变成D盘怎么办?
Webpack4从入门到精通以及和webpack5对比_webpack现在用的是哪个版本
【译】发布 .NET Aspire 预览版 2(二)
LLMs AWS Sagemaker JumpStart
【Linux集群教程】14 集群装机 - PXE原理和PXE服务搭建
信号完整性(SI)电源完整性(PI)学习笔记(十八)传输线的串扰(二)
- 原文地址:https://blog.csdn.net/Ashen_0nee/article/details/126677150
