-
ROS 位置姿态Odometry仿真模拟(gmapping)
使用单纯的雷达数据进行 2D 建立图像的时候,建图的效果和雷达的性能也有关系,雷达的扫描频率会随着小车的移动速度增大而变化,通过更改扫描的频率来更新栅格地图的完整性。
点击DEMO-LINK

所需要的环境
ubuntu 18.04 + ROS Melodic desktop full #ROS 别的可运行版本也可以
主要文件夹
mini_sim18_ws 这个文件夹是主要的工作空间,通过 roslaunch 执行 launch 文件去观察和控制 demo
original_neor_mini 这个文件夹是一个原始的 neor _ mini urdf 文件,你可以自己构建
pictures 全过程图片下载编译
# 打开一个终端 git clone https://github.com/COONEO/neor_mini.git cd neor_mini/mini_sim18_ws rosdep install --from-paths src --ignore-src -r -y # 需要一定时间 # 编译空间 catkin_make # 如果失败了请重复- 1
- 2
- 3
- 4
- 5
- 6
- 7
如果出现依赖错误的的话,类似于下面的情况

去文件夹里面将一下两个文件夹删除

然后重新编译
得到的编译结果会生成可执行文件(包含各个功能包的编译文件)

总共有五个功能包
neor_mini # 用 urdf 文件存储 neor mini 外观的说明
steer_drive_ros # 运动学 ROS 插件
steer_mini_gazebo # 存储发射文件的新近迷你模型可视化在露台
mini_gmapping # 存储启动文件和 gmap params 文件
mini_navigation # 存储启动文件和导航参数文件执行 Demo
查看demo小车模型 Rviz
cd ~/neor_mini/mini_sim18_ws source devel/setup.bash roslaunch neor_mini display.launch- 1
- 2
- 3

可以通过更改滑动条更改模型的脚点链接位置
查看仿真雷达模型 urdf
cd ~/neor_mini/mini_sim18_ws source devel/setup.bash roslaunch neor_mini display_gazebo_sensors.launch- 1
- 2
- 3

同样也可以可以通过更改滑动条更改模型的脚点链接位置
gazebo 仿真 demo 测试
cd ~/neor_mini/mini_sim18_ws source devel/setup.bash roslaunch steer_mini_gazebo steer_mini_sim_sensors.launch- 1
- 2
- 3

通过使用小窗口上的速度和方向控制小车,控制小车的运行轨迹
使用 neor_mini urdf 进行 Gmapping建图
cd ~/neor_mini/mini_sim18_ws source devel/setup.bash roslaunch mini_gmapping gmapping_steer_mini_sensors.launch- 1
- 2
- 3

同样也是可以通过控制小窗上的键位来控制小车运动的位置
rf20_laser_odometry ROS 包可调参数
上述仓库的 demo 用来验证(根据相邻的雷达数据帧推算出本体的2D姿态数据,结合周围的测距数据,构建对应的栅格地图)。
- 订阅
scan (sensor_msgs/LaserScan) # 定于的雷达话题数据
tf (tf/tfMessage) # 静态的 tf 变换- 发布
odom (nav_msgs/Odometry) # 估计的里程计话题数据输出
tf (tf/tfMessage) # 发布的odom坐标系和base_link坐标系之间的tf变换同样的可以通过更改仿真中的扫描频率来降低性能和适用的范围
在 neor_mini/mini_sim18_ws/src/neor_mini/urdf
修改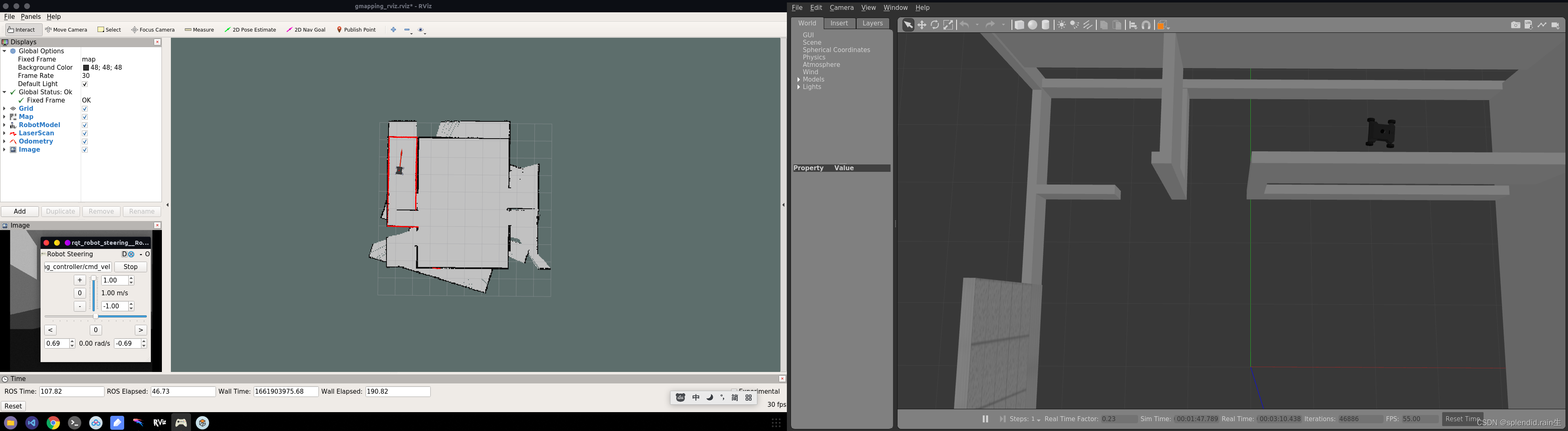false 40 ...- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
里程计的描述消息
# rf2o_laser_odometry 激光里程计节点配置 <node pkg="rf2o_laser_odometry" type="rf2o_laser_odometry_node" name="rf2o_laser_odometry" > <param name="laser_scan_topic" value="/scan"/> # topic where the lidar scans are being published <param name="odom_topic" value="/odom" /> # topic where tu publish the odometry estimations <param name="publish_tf" value="true" /> # wheter or not to publish the tf::transform (base->odom) <param name="base_frame_id" value="/base_link"/> # frame_id (tf) of the mobile robot base. A tf transform from the laser_frame to the base_frame is mandatory <param name="odom_frame_id" value="/odom" /> # frame_id (tf) to publish the odometry estimations <param name="init_pose_from_topic" value="" /> # (Odom topic) Leave empty to start at point (0,0) <param name="freq" value="5.0"/> # Execution frequency. <param name="verbose" value="true" /> </node>- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
脚本运行
根据上述描述完里程计之后,可以使用 gmapping 来建图,然后运行脚本
roslaunch mini_gmapping laser_odom_gmapping.launch
仓库示例中还有很多可以调用
例如:
雷达点云3D 建图

Updating…
🌸🌸🌸完结撒花🌸🌸🌸
🌈🌈@Redamancy🌈🌈
-
相关阅读:
Hadoop3教程(十二):MapReduce中Shuffle机制的概述
2023 CCF国际AIOps挑战赛,报名倒计时!|截止时间9月15日
HyperLynx(十七)SATA的设计与仿真
js函数新东西——匿名函数
北邮22级信通院数电:Verilog-FPGA(6)第六周实验:全加器(关注我的uu们加群咯~)
CSS魔法!如何将任意CSS类型转换为数值?
DataBinding使用报错
对比两个数组中 每个对应位置的元素大小 返回每个对比结果组成的列表 numpy.fmin()
毅速课堂:3D打印随形水路设计应注意什么?
C++之map_set的使用
- 原文地址:https://blog.csdn.net/Msyusheng/article/details/126612742