-
STM32的IIC
IIC介绍
IIC(Inter-Integrated Circuit)总线是一种由 PHILIPS 公司开发的两线式串行总线。
通信距离

通信速度


主从方式

通信方式

物理结构


I2C总线上传输的每一位数据都有一个时钟脉冲相对应,即同步控制。数据位的传输是边沿触发。
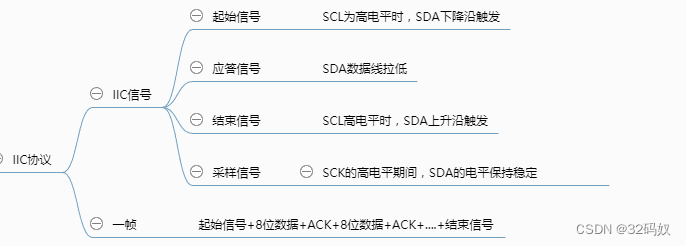
IIC协议
空闲状态
SDA和SCL两条线同时处于高电平为总线空闲状态。由两个上拉电阻拉高。
开始信号、结束信号和应答信号
SDA数据线,SCL时钟线
-
开始信号:SCL 为高电平时,SDA 由高电平向低电平跳变,开始传送数据。是一种电平跳变时序信号,而非一个电平信号。
-
结束信号:SCL 为高电平时,SDA 由低电平向高电平跳变,结束传送数据。

-
应答信号ACK:发送器每发送一个字节,接收数据的 IC 在接收到 8bit 数据后,向发送数据的 IC 发出特定的低电平脉冲,表示已收到数据,即由接收器反馈的应答信号。将SDA拉低,并保证在该时钟的高电平前进为稳定的低电平。
-
如果ACK为低电平为有效应答,如果是高电平就是非应答位NACK,也就是没有成功。
-
如果接收器是主控器,收到最后一个字节后,发送NACK信号,以通知发送器数据发送结束,并释放SDA。

向从机发送数据的过程
- 主机发送start信号;总线处于占用状态。
- 主机发送从机地址,高7bit是地址,bit0是读写控制位,0表示写,1表示读;
- 从机返回ACK响应信号;
- 主机发送要给从机写入数据的地址;(有的设备不用)
- 从机返回ACK响应信号;
- 主机发送数据;
- 从机返回ACK响应信号;
重复第6和7步,直到从机返回一个NACK非响应信号;
主机发送停止信号,结束数据传输。

读取从机数据的过程
- 主机发送start信号;
- 主机发送从机地址,高7bit是地址,bit0是读写控制位,0表示写,1表示读;
- 从机返回ACK响应信号;
- 主机发送要给从机读入数据的地址;(有的设备不用)
- 从机返回ACK响应信号;
- 重新启动IIC总线,发送start信号;(前面步骤的目的向从机传送地址,下面开始读取数据)
- 主机发送从机地址,高7bit是地址,bit0是读写控制位,0表示写,1表示读;
- 从机返回ACK响应信号;
- 主机接收数据;
- 从机返回ACK响应信号;
重复第9和01步,直到从机返回一个NACK非响应信号;
主机发送停止信号,结束数据传输。

数据有效性
IIC总线数据传送时,时钟的高电平期间,数据线上的数据必须保持稳定,不允许变化。即SCL的上升沿到来前要准备好,下降沿到来前必须可靠。
SDA的数据在SCL高电平期间被写入从机。所以SDA的数据变化要发生在SCL低电平期间。

协议一帧构成


IIC实验目的
开机的时候先检测 24C02 是否存在,然后在主循环里面用 1 个按键(KEY0)用来执行写入 24C02 的操作,另外一个按键(WK_UP)用来执行读出操作,在 TFTLCD模块上显示相关信息。
24C02硬件连接图
板载的EEPROM芯片型号为24C02。
该芯片的总容量是256个字节,该芯片通过 IIC 总线与外部连接。- 24C02 的 SCL 和 SDA 分别连在 STM32 的 PB6 和 PB7 上的
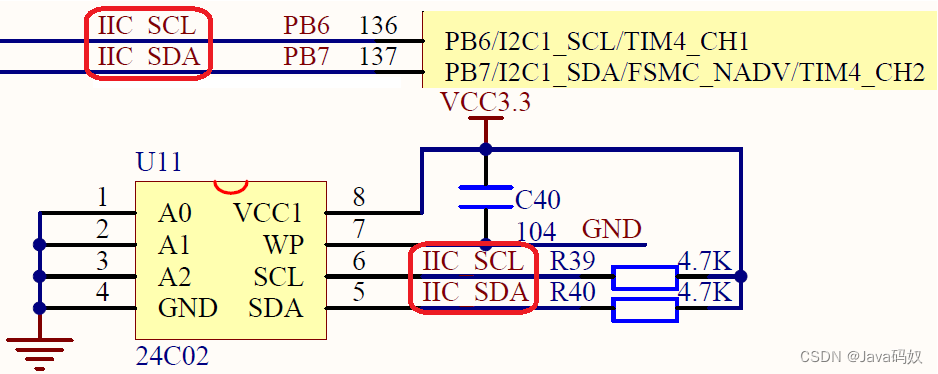
WP:write Protect 写保护就不能操作
A0-A2,地址线,默认接地,地址000,最高就是256
地址如下:

-
器件地址:固定地址(4)+ 可编程地址(3)+ 读写为(0读1写)
-
高四位是出厂时写好的地址,A1-3是可调整的硬件地址线,这七位就是地址,最后一位是读写控制,读是1,写是0
读写时序

-
开始,外设地址,应答,写入位置,应答,数据,应答
ST公司为了规避飞利浦IIC专利问题,将STM32 的硬件 IIC 非常复杂,更重要的是不稳定,故不推荐使用。所以通常就通过模拟来实现了。
初始化IIC
该段代码可以用在任何 IIC 设备上。
引脚初始化
#include "myiic.h" #include "delay.h" //初始化 IIC void IIC_Init(void) { GPIO_InitTypeDef GPIO_InitStructure; RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE );//PB 时钟使能 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6|GPIO_Pin_7; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP ; //推挽输出 GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOB, &GPIO_InitStructure); //初始化 GPIO GPIO_SetBits(GPIOB,GPIO_Pin_6|GPIO_Pin_7); //PB6,PB7 输出高 }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
这段代码是对GPIOB端口的一个初始化。
为什么是GPIOB呢?前面我们说过24C02 的 SCL 和 SDA 分别连在 STM32 的 PB6 和 PB7 上。
GPIOB挂载在APB2之下,这里可以参考APB2 外设时钟使能寄存器(RCC_APB2ENR)
RCC_APB2Periph_GPIOB是宏定义,这里可以参考使能IO口时钟
按理说I2C接口应该如下设置或者按照中文参考手册,这里却用了推挽,暂时不知为何,很可能是按照常规思想,没有特殊要求则推挽的思路。-
SCL,SDA可以配置成推挽输出、开漏输出(上拉电阻输出1)
- 开漏输出有线与特性,当多个器件通讯的时候,因为线与. 如果主设备A拉高SDA时, 已经有其他主设备将SDA拉低了. 由于 1 & 0 = 0 那么主设备A在检查SDA电平时, 会发现不是高电平, 而是低电平. 说明其他主设备抢占总线的时间比它早, 主设备A只能放弃占用总线. 如果是高电平, 则可以占用.
-
SCL,SDA也可以配置成开漏输出、开漏输出(开漏输出为防止多个器件存在短路)
-
SCL,SDA也可以配置成推挽输出、推挽输出与浮空输入(通过切换模式)
中文参考手册中的推荐设置为

输出模式只有三种,最常用的就是50MHz,可以参考解析GPIO_Init()
SetBits可以参考GPIO相关库函数
开始都是高电平起始信号
//产生 IIC 起始信号 void IIC_Start(void) { SDA_OUT(); //sda 线输出 IIC_SDA=1; IIC_SCL=1; delay_us(4); IIC_SDA=0; //START:when CLK is high,DATA change form high to low delay_us(4); IIC_SCL=0; //钳住 I2C 总线,准备发送或接收数据 }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
保持SCL为高电平,SDA产生一个下降沿,然后SCL拉低,一个START信号产生;
停止信号
//产生 IIC 停止信号 void IIC_Stop(void) { SDA_OUT(); //sda 线输出 IIC_SCL=0; IIC_SDA=0; //STOP:when CLK is high DATA change form low to high delay_us(4); IIC_SCL=1; IIC_SDA=1; //发送 I2C 总线结束信号 delay_us(4); }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
保持SCL为高电平,SDA产生一个上升沿,一个STOP信号产生。
应答信号
//等待应答信号到来 //返回值:1,接收应答失败 // 0,接收应答成功 u8 IIC_Wait_Ack(void) { u8 ucErrTime=0; SDA_IN(); //SDA 设置为输入 IIC_SDA=1;delay_us(1); IIC_SCL=1;delay_us(1); while(READ_SDA)//一直等,等不到就停止 { ucErrTime++; if(ucErrTime>250) { IIC_Stop(); return 1; } } IIC_SCL=0; //时钟输出 0 return 0; } //产生 ACK 应答 void IIC_Ack(void) { IIC_SCL=0; SDA_OUT(); IIC_SDA=0; delay_us(2); IIC_SCL=1; delay_us(2); IIC_SCL=0; } //不产生 ACK 应答 void IIC_NAck(void) { IIC_SCL=0; SDA_OUT(); IIC_SDA=1; delay_us(2); IIC_SCL=1; delay_us(2); IIC_SCL=0; }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
在大于一个时钟脉冲的时间保持SDA为低电平
发送一个字节
//IIC 发送一个字节 //返回从机有无应答 //1,有应答 //0,无应答 void IIC_Send_Byte(u8 txd) { u8 t; SDA_OUT(); IIC_SCL=0;//拉低时钟开始数据传输 for(t=0;t<8;t++) { IIC_SDA=(txd&0x80)>>7; 从最高位开始发数据,最高位移到最低 txd<<=1; delay_us(2); //对 TEA5767 这三个延时都是必须的 IIC_SCL=1; delay_us(2); IIC_SCL=0; delay_us(2); } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
一个CLK对应发送一个bit,先将SCL拉低,然后准备好要发送的数据,然后将SCL拉高,产生一个CLK时钟脉冲,数据就能直接发往从机;从高位(MSB)开始发送直到最低位(LSB),每发送完一个位后左移一位,确保每一位的数据都能正确发送,最后将SCL重新拉低。
读一个字节
//读 1 个字节,ack=1 时,发送 ACK,ack=0,发送 nACK u8 IIC_Read_Byte(unsigned char ack) { unsigned char i,receive=0; SDA_IN(); //SDA 设置为输入 for(i=0;i<8;i++ ) { IIC_SCL=0; delay_us(2); IIC_SCL=1; //上升沿的时候去读 receive<<=1; if(READ_SDA)receive++; delay_us(1); } //读完了之后要应答 if (!ack) IIC_NAck(); //发送 nACK else IIC_Ack(); //发送 ACK return receive; }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
该部分为 IIC 驱动代码,实现包括 IIC 的初始化(IO 口)、IIC 开始、IIC 结束、ACK、IIC读写等功能。
在其他函数里面,只需要调用相关的 IIC 函数就可以和外部 IIC 器件通信了EEPROM-24c02
硬件引脚
什么是EEPROM?
总容量是256(2K/8)个字节,也就是2的8次方个字节,每个字节八位,共2K个位,10次方。
引脚

硬件上设置了A0=A1=A2=0硬件地址

高四个位是固定的是10,即A,后边懂了吧。iic.h
#ifndef __MYIIC_H #define __MYIIC_H #include "sys.h" //IO 方向设置 #define SDA_IN() {GPIOB->CRL&=0X0FFFFFFF;GPIOB->CRL|=(u32)8<<28;} #define SDA_OUT() {GPIOB->CRL&=0X0FFFFFFF;GPIOB->CRL|=(u32)3<<28;}//IO 操作函数 #define IIC_SCL #define IIC_SDA //SCL #endif- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
该部分代码的 SDA_IN()和 SDA_OUT()分别用于设置 IIC_SDA 接口为输入和输出
IIC 接口来操作 24Cxx 芯片
接下来我们看看 24cxx.c 文件代码:
#include “24cxx.h”
#include “delay.h”
//初始化 IIC 接口
void AT24CXX_Init(void)
{
IIC_Init();
}读一个字节
//在 AT24CXX 指定地址读出一个数据 //ReadAddr:开始读数的地址 //返回值 :读到的数据 u8 AT24CXX_ReadOneByte(u16 ReadAddr) { u8 temp=0; IIC_Start(); if(EE_TYPE>AT24C16) { IIC_Send_Byte(0XA0); //发送写命令 IIC_Wait_Ack(); IIC_Send_Byte(ReadAddr>>8); //发送高地址 }else IIC_Send_Byte(0XA0+((ReadAddr/256)<<1)); //发送器件地址 0XA0,写数据 IIC_Wait_Ack(); IIC_Send_Byte(ReadAddr%256); //发送低地址 IIC_Wait_Ack(); IIC_Start(); IIC_Send_Byte(0XA1); //进入接收模式 IIC_Wait_Ack(); temp=IIC_Read_Byte(0); IIC_Stop(); //产生一个停止条件 return temp; }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
写一个字节
//在 AT24CXX 指定地址写入一个数据 //WriteAddr :写入数据的目的地址 //DataToWrite:要写入的数据 void AT24CXX_WriteOneByte(u16 WriteAddr,u8 DataToWrite) { IIC_Start(); if(EE_TYPE>AT24C16) { IIC_Send_Byte(0XA0); //发送写命令 IIC_Wait_Ack(); IIC_Send_Byte(WriteAddr>>8);//发送高地址 }else IIC_Send_Byte(0XA0+((WriteAddr/256)<<1)); //发送器件地址 0XA0,写数据 IIC_Wait_Ack(); IIC_Send_Byte(WriteAddr%256); //发送低地址 IIC_Wait_Ack(); IIC_Send_Byte(DataToWrite); //发送字节 IIC_Wait_Ack(); IIC_Stop(); //产生一个停止条件 delay_ms(10); }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
写一定长度的字节
//在 AT24CXX 里面的指定地址开始写入长度为 Len 的数据 //该函数用于写入 16bit 或者 32bit 的数据. //WriteAddr :开始写入的地址 //DataToWrite:数据数组首地址 //Len :要写入数据的长度 2,4 void AT24CXX_WriteLenByte(u16 WriteAddr,u32 DataToWrite,u8 Len) { u8 t; for(t=0;t<Len;t++) { AT24CXX_WriteOneByte(WriteAddr+t,(DataToWrite>>(8*t))&0xff); } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
读一定长度的字节
//在 AT24CXX 里面的指定地址开始读出长度为 Len 的数据 //该函数用于读出 16bit 或者 32bit 的数据. //ReadAddr :开始读出的地址 //返回值 :数据 //Len :要读出数据的长度 2,4 u32 AT24CXX_ReadLenByte(u16 ReadAddr,u8 Len) { u8 t; u32 temp=0; for(t=0;t<Len;t++) { temp<<=8; temp+=AT24CXX_ReadOneByte(ReadAddr+Len-t-1); } return temp; } //检查 AT24CXX 是否正常,写一个值再读回来,看是不是这个值。 //这里用了 24XX 的最后一个地址(255)来存储标志字. //如果用其他 24C 系列,这个地址要修改 //返回 1:检测失败 //返回 0:检测成功 u8 AT24CXX_Check(void) { u8 temp; temp=AT24CXX_ReadOneByte(255); //避免每次开机都写 AT24CXX if(temp==0X55)return 0; else //排除第一次初始化的情况 { AT24CXX_WriteOneByte(255,0X55); temp=AT24CXX_ReadOneByte(255); if(temp==0X55)return 0; } return 1; } //在 AT24CXX 里面的指定地址开始读出指定个数的数据 //ReadAddr :开始读出的地址 对 24c02 为 0~255 //pBuffer :数据数组首地址 //NumToRead:要读出数据的个数 void AT24CXX_Read(u16 ReadAddr,u8 *pBuffer,u16 NumToRead) { while(NumToRead) { *pBuffer++=AT24CXX_ReadOneByte(ReadAddr++); NumToRead--; } } //在 AT24CXX 里面的指定地址开始写入指定个数的数据 //WriteAddr :开始写入的地址 对 24c02 为 0~255 //pBuffer :数据数组首地址 //NumToWrite:要写入数据的个数 void AT24CXX_Write(u16 WriteAddr,u8 *pBuffer,u16 NumToWrite) { while(NumToWrite--) { AT24CXX_WriteOneByte(WriteAddr,*pBuffer); WriteAddr++; pBuffer++; } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
这部分代码实际就是通过 IIC 接口来操作 24Cxx 芯片,理论上是可以支持 24Cxx 所有系列的芯片的(地址引脚必须都设置为 0),24CXX 的型号定义在 24cxx.h 文件里面,通过 EE_TYPE 设置。
IIC步骤总结
- 开启GPIOB时钟
- 设置GPIOB的参数,初始化GPIOB
- 主机发送start信号;
- 主机发送从机地址,高7bit是地址,bit0是读写控制位,0表示写,1表示读;
- 从机返回ACK响应信号;
- 主机发送要给从机写入数据的地址;(有的设备不用)
- 从机返回ACK响应信号;
- 主机发送数据;
- 从机返回ACK响应信号;
-
-
相关阅读:
青少年python系列 26.turtle库绘制一个四叶草
Flutter ☞ 变量
对某钓鱼样本分析
C/C++ Linux 开发环境
在Ubuntu中设置中文输入法的步骤
git图形化管理工具
Three.js的渲染器:WebGLRenderer、CSS3DRenderer、SVGRenderer
计算机网络面经八股-HTTP请求报文和响应报文的格式?
C语言基础-结构体
【精】alibaba-sentinel 管理控制台 啥都没有 ,一片空白解决。
- 原文地址:https://blog.csdn.net/qq_45578181/article/details/126492667
