-
Unet语义分割训练和TensorRT部署
参考链接:https://gitee.com/dogeblog/unet#%E4%BB%8B%E7%BB%8D
防止失效,以下记录:
介绍
基于unet的语义分割。 包括标注,标注结果转训练集,数据集训练,训练结束后转tensorrt,tensorrt客户端部署。tensorrt部署后,640*360的图,在rtx3090推理时间4-5ms
原始代码来源
unet代码源于https://github.com/milesial/Pytorch-UNet
tensorrt代码源于https://github.com/wang-xinyu/tensorrtx 与 https://github.com/YuzhouPeng/unet-tensorrt
1.标注
参考https://gitee.com/doge_ac_cn/labelme#installation2.生成unet训练的数据集
1.先把labelme标注的结果放在 labelme绘制mask/labelme 文件夹下。2.然后先后运行labelme2coco.py和genneratemask.py,分别生成coco标注文件和mask文件。
3.训练
1.把原图和mask分别拷贝到 Pytorch-UNet/data 的img和mask文件夹下2.运行train.py
3.命令行输入tensorboard --logdir=runs
然后进入http://localhost:6006/ 即可查看运行的loss值,学习率,验证集效果。
4.转tensorrt 的 推理 engine
看unet2tensorrt的readme即可这里直接转的话,会与python的结果有误差
详情见作者的issue https://github.com/wang-xinyu/tensorrtx/issues/526 与 https://github.com/YuzhouPeng/unet-tensorrt/issues/8
作者代码链接:
https://download.csdn.net/download/zhouzongzong/864003865、Cmake文件(关于如何用Cmake配置opencv C++环境)
参考链接:https://blog.csdn.net/Wuhao9_/article/details/123980679cmake_minimum_required(VERSION 2.6) project(unet) add_definitions(-std=c++11) option(CUDA_USE_STATIC_CUDA_RUNTIME OFF) set(CMAKE_CXX_STANDARD 11) set(CMAKE_BUILD_TYPE Debug) set(CUDA_NVCC_FLAGS ${CUDA_NVCC_FLAGS};-std=c++11;-g;-G;-gencode;arch=compute_30;code=sm_30) # cuda directory include_directories(${PROJECT_SOURCE_DIR}/include) include_directories(C:/Program Files/NVIDIA GPU\ Computing\ Toolkit/CUDA/v11.4/include) link_directories(C:/Program Files/NVIDIA GPU Computing Toolkit/CUDA/v11.4/lib/x64) # tensorrt include_directories(F:/yolov5_tensorRT/TensorRT-8.0.3.4/include) link_directories(F:/yolov5_tensorRT/TensorRT-8.0.3.4/lib) set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -std=c++11 -Wall -Ofast -Wfatal-errors -D_MWAITXINTRIN_H_INCLUDED") # link library and add exec file add_executable(unet ${PROJECT_SOURCE_DIR}/unet.cpp) target_link_libraries(unet nvinfer) target_link_libraries(unet cudart) add_definitions(-O2 -pthread) # opencv library find_package(OpenCV) include_directories(${OpenCV_INCLUDE_DIRS}) target_link_libraries(unet ${OpenCV_LIBS})- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35

Cmake后生成文件:

6、错误定位:基本运行检查改为默认值(D8016:O2和RTC1命令行选项不兼容)

下面命令行删除,否则出现,error D8021: 无效的数值参数

7、运行测试:
运行前需要更改路径权重参数路径:

确认使用推理的精度:



利用unet -s命令生成引擎文件unet.engine
利用unet -d …/samples 进行测试,kTF32精度时间
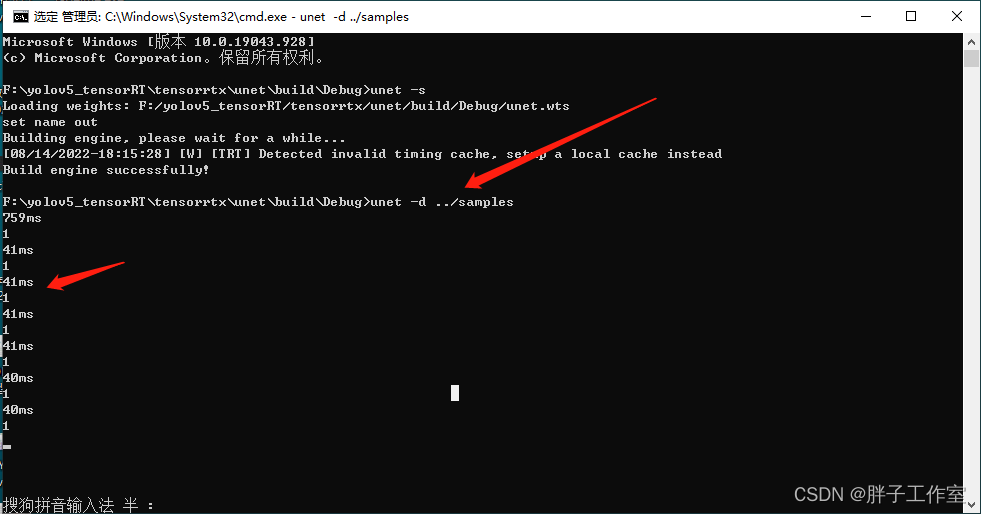 利用unet -d …/samples 进行测试, kFP16精度时间
利用unet -d …/samples 进行测试, kFP16精度时间


-
相关阅读:
PTQ量化和QAT量化
Sora 的工作原理(及其意义) [译]
java面试题:java中的单例设计模式及两种实现方法的代码举例
Nacos与Eureka的区别
2023 年 亚太赛 APMCM ABC题 国际大学生数学建模挑战赛 |数学建模完整代码+建模过程全解全析
判断链表中是否有环
uboot源码
串口与协议-推荐阅读
《Effective C++》条款21
linux下安装java
- 原文地址:https://blog.csdn.net/zhouzongzong/article/details/126334252