-
三种常见的移动底盘运动学模型分析
目录
前言
现在大三暑假,开学就要着手准备毕设了,接手了实验室师兄的激光SLAM小车项目,先从下位机学起,争取把整个项目接受下来,有所收获有所创新。
这篇是在学习代码过程中,对四轮差速小车、麦克纳姆轮小车以及两轮差速小车运动学模型的学习总结。
一、四轮差速运动模型
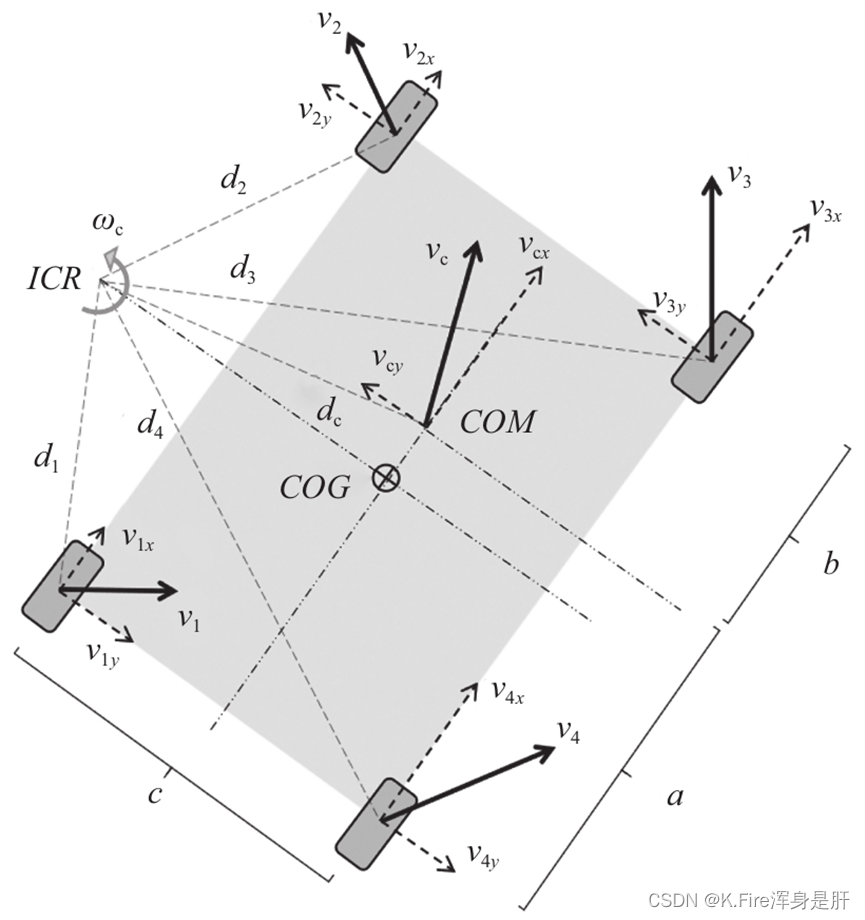
符号说明:
在四轮差速模型中,前轮和后轮的速度是同步的,这里以底盘几何中心COG沿y轴方向上的点ICR作为整个底盘进行圆周运动时的圆心,ICR和COG的距离大小与圆周运动角速度大小有关。

公式推导:
绕圆心做圆周运动的物体,其线速度v、角速度w和圆周半径d满足w=v/d。因此可以建立底盘中的约束关系:

假设线
 与y轴的夹角为,可以对上式进行变形,结果如下所示:
与y轴的夹角为,可以对上式进行变形,结果如下所示:

刚体旋转时,各个位置的角速度与质心处的角速度是一样的,即四个轮子绕ICR旋转的角速度也是
 。按照上式推理,同样可以得到以下约束关系式:
。按照上式推理,同样可以得到以下约束关系式:

同时,
 与在x轴和y轴上的投影长度满足下式关系:
与在x轴和y轴上的投影长度满足下式关系:

当四轮差速底盘设定的左轮、游轮速度分别为
 和
和 ,且前轮、后轮速度严格同步时,有下式所示关系:
,且前轮、后轮速度严格同步时,有下式所示关系:

综合上式可以得到以下结果:


将上式整理后,得到四轮差速底盘的前向运动学关系:
![\left[ \begin{array}{c} v_{cx}\\ \omega _z\\ \end{array} \right] =\left[ \begin{matrix} \frac{1}{2}& \frac{1}{2}\\ -\frac{1}{c}& \frac{1}{c}\\ \end{matrix} \right] \left[ \begin{array}{c} v_l\\ v_r\\ \end{array} \right]](https://1000bd.com/contentImg/2022/07/30/032020639.gif)
参考博客:移动机器人运动模型(两轮、四轮、麦克纳姆轮和概率运动)_anthony-36的博客-CSDN博客_移动机器人运动模型
二、麦克纳姆轮运动学模型

已知车中心的xy方向线速度
 、
、 和角速度
和角速度 ,可以计算出每个轮子的中心速度:
,可以计算出每个轮子的中心速度:
那么轮子中心的xy方向速度分量为:



根据轮子中心的速度,可以分解为沿辊子方向速度和垂直辊子方向速度,垂直辊子方向速度可以不记,
 是沿辊子方向的单位向量(投影),可以得到:
是沿辊子方向的单位向量(投影),可以得到:
辊子方向与x轴方向夹角为45°,则单位向量可以表示为:
则有:

化简后得到:

然后从与地面接触的辊子速度到轮子线转速:

代入上述
 、
、 计算公式得:
计算公式得:

依次可得四个轮子的计算公式:

式中
 、
、 是车身横向距离和纵向距离的一半
是车身横向距离和纵向距离的一半参考博客:一文读懂麦克纳姆轮全向移动原理及剖析_苏守坤的博客-CSDN博客_麦克纳姆轮原理
在小车横向距离和纵向距离相近时,麦轮的运动学模型会退化成四轮差速小车的运动学模型,y方向的速度为0,
、相等,看一下公式就推出来了。
三、两轮差速运动学模型
运动特性为两轮差速驱动,其底部后方两个同构驱动轮的转动为其提供动力,前方的随动轮起支撑作用并不推动其运动,两轮差速驱动如下图所示。

它的解算是要达到下图所示目的:
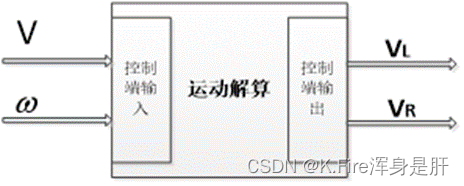
给定前进速度和角速度,计算出左右轮的速度。
根据高中所学的线速度角速度公式,可得:


参考博客:两轮差速机器人运动学模型_奔驰的战猪的博客-CSDN博客_两轮差速模型
总结
感谢CSDN各位大佬,让菜鸡又学到了知识
-
相关阅读:
安装指定版本nodejs
Java文件前后端上传下载工具类
java题库——认证考试题1
Spark SQL结构化数据文件处理
使用git时,错误集锦
Vue3项目关于轮播图的封装应该怎么封装才是最简单的呢
代码复现——gradle项目
多种多模态图像融合方法
【SQL刷题】Day13----SQL分组数据专项练习
SpringBoot的静态资源访问问题
- 原文地址:https://blog.csdn.net/qq_52785580/article/details/125995617