-
汽车电子专业知识篇(六十四)-车载毫米波雷达基本概念
首先给大家介绍车载毫米波雷达基本概念。重点从通俗易懂的角度向大家介绍毫米波雷达基本原理、最大探测距离和距离分辨率、最大测速范围和速度分辨率、最大测角范围和角度分辨率。
1 毫米波雷达原理
毫米波雷达利用发射信号和接收信号之间的频率差来进行测距、测速,利用天线阵元之间的相 位差来进行测角。毫米波雷达系统框图如下图所示:
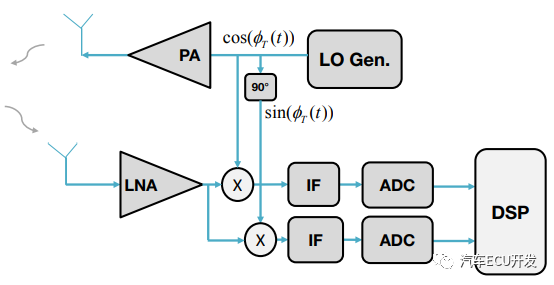
图1 毫米波雷达系统框图
(1)毫米波雷达首先通过信号发生器(图中LO Gen.)产生我们所需要的雷达信号波形,如现在常用的快速锯齿波或者叫线性调频连续波(FMCW),这时被产生的信号还是基带信号,不能够直接发射出去,还需要多级变频调制处理,将产生的雷达波形信号调制到76GHz~77GHz之间,经过放大器(PA)放大之后,再经发射天线(TX)辐射到空间中去。目前77GHz常用的FMCW波形示意图如下图所示:

图2 FMCW雷达波形示意图
实际雷达工作波形并没有图2这么理想,真正的雷达工作波形将在后面贴上。毫米波雷达在一个工作周期内或者一帧内(简称一个Frame)发射一连串的FMCW信号,一个FMCW就是一个Chirp。如图2所示,一个Frame由N个Chirp组成。
-
相关阅读:
工薪信用贷款全攻略:条件、流程与选择
arm_按键中断控制LED、蜂鸣器、风扇
linux中的交互式进程查看命令htop
Springboot启动流程分析(一):IOC容器初始化
长时间久坐危害竟然这么大,这4项检查,男性朋友一定要定期查
[ 网络基础篇 ] Windows 远程连接 linux 机器 && Windows 远程连接 windows 机器(详解)
Ansible脚本进阶---playbook
Win10系统打开组策略编辑器的两种方法
Vitis AI 全中文文档集合
Kafka3.0.0版本——消费者(分区的分配以及再平衡)
- 原文地址:https://blog.csdn.net/m0_50230964/article/details/123174712