-
图论篇--代码随想录算法训练营第五十八天打卡|拓扑排序,dijkstra(朴素版),dijkstra(堆优化版)精讲
拓扑排序
题目链接:117. 软件构建
题目描述:
某个大型软件项目的构建系统拥有 N 个文件,文件编号从 0 到 N - 1,在这些文件中,某些文件依赖于其他文件的内容,这意味着如果文件 A 依赖于文件 B,则必须在处理文件 A 之前处理文件 B (0 <= A, B <= N - 1)。请编写一个算法,用于确定文件处理的顺序。
算法思路:
拓扑排序:给出一个 有向图,把这个有向图转成线性的排序
拓扑排序的过程:
- 找到入度为0 的节点,加入结果集
- 将该节点从图中移除
代码:
- #include
- #include
- #include
- #include
- using namespace std;
- int main() {
- int m, n, s, t;
- cin >> n >> m;
- vector<int> inDegree(n, 0); // 记录每个文件的入度
- unordered_map<int, vector<int>> umap;// 记录文件依赖关系
- vector<int> result; // 记录结果
- while (m--) {
- // s->t,先有s才能有t
- cin >> s >> t;
- inDegree[t]++; // t的入度加一
- umap[s].push_back(t); // 记录s指向哪些文件
- }
- queue<int> que;
- for (int i = 0; i < n; i++) {
- // 入度为0的文件,可以作为开头,先加入队列
- if (inDegree[i] == 0) que.push(i);
- //cout << inDegree[i] << endl;
- }
- // int count = 0;
- while (que.size()) {
- int cur = que.front(); // 当前选中的文件
- que.pop();
- //count++;
- result.push_back(cur);
- vector<int> files = umap[cur]; //获取该文件指向的文件
- if (files.size()) { // cur有后续文件
- for (int i = 0; i < files.size(); i++) {
- inDegree[files[i]] --; // cur的指向的文件入度-1
- if(inDegree[files[i]] == 0) que.push(files[i]);
- }
- }
- }
- if (result.size() == n) {
- for (int i = 0; i < n - 1; i++) cout << result[i] << " ";
- cout << result[n - 1];
- } else cout << -1 << endl;
- }
dijkstra(朴素版)
题目链接:47. 参加科学大会(第六期模拟笔试)
题目描述:
小明是一位科学家,他需要参加一场重要的国际科学大会,以展示自己的最新研究成果。
小明的起点是第一个车站,终点是最后一个车站。然而,途中的各个车站之间的道路状况、交通拥堵程度以及可能的自然因素(如天气变化)等不同,这些因素都会影响每条路径的通行时间。
小明希望能选择一条花费时间最少的路线,以确保他能够尽快到达目的地。
算法思路:
dijkstra算法:在有权图(权值非负数)中求从起点到其他节点的最短路径算法。
需要注意两点:
- dijkstra 算法可以同时求 起点到所有节点的最短路径
- 权值不能为负数
dijkstra三部曲:
- 第一步,选源点到哪个节点近且该节点未被访问过
- 第二步,该最近节点被标记访问过
- 第三步,更新非访问节点到源点的距离(即更新minDist数组)
minDist数组 用来记录 每一个节点距离源点的最小距离。
代码:
- #include
- #include
- #include
- using namespace std;
- int main() {
- int n, m, p1, p2, val;
- cin >> n >> m;
- vector
- for(int i = 0; i < m; i++){
- cin >> p1 >> p2 >> val;
- grid[p1][p2] = val;
- }
- int start = 1;
- int end = n;
- // 存储从源点到每个节点的最短距离
- std::vector<int> minDist(n + 1, INT_MAX);
- // 记录顶点是否被访问过
- std::vector<bool> visited(n + 1, false);
- minDist[start] = 0; // 起始点到自身的距离为0
- for (int i = 1; i <= n; i++) { // 遍历所有节点
- int minVal = INT_MAX;
- int cur = 1;
- // 1、选距离源点最近且未访问过的节点
- for (int v = 1; v <= n; ++v) {
- if (!visited[v] && minDist[v] < minVal) {
- minVal = minDist[v];
- cur = v;
- }
- }
- visited[cur] = true; // 2、标记该节点已被访问
- // 3、第三步,更新非访问节点到源点的距离(即更新minDist数组)
- for (int v = 1; v <= n; v++) {
- if (!visited[v] && grid[cur][v] != INT_MAX && minDist[cur] + grid[cur][v] < minDist[v]) {
- minDist[v] = minDist[cur] + grid[cur][v];
- }
- }
- }
- if (minDist[end] == INT_MAX) cout << -1 << endl; // 不能到达终点
- else cout << minDist[end] << endl; // 到达终点最短路径
- }
dijkstra(堆优化版)精讲
算法思路:
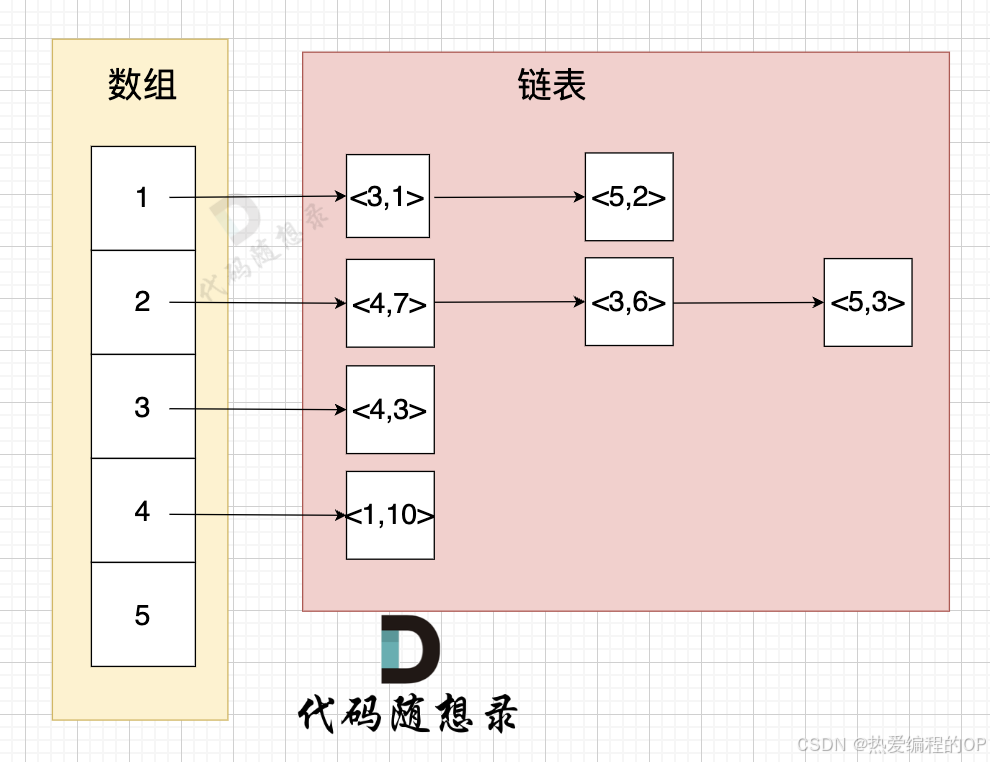
朴素版考虑点,堆优化版考虑边(类似于prim和kruskal算法)
1、使用邻接表存图信息<节点,权值>
2、dijkstra 三部曲:
- 第一步,选源点到哪个节点近且该节点未被访问过-->使用一个 小顶堆 来帮我们对边的权值排序,每次从小顶堆堆顶 取边就是权值最小的边。
- 第二步,该最近节点被标记访问过。-->同朴素版
- 第三步,更新非访问节点到源点的距离(即更新minDist数组)-->遍历该节点在邻接表中所指向的一系列节点,若之前为访问过,则入堆。
-
相关阅读:
K8S之Ingress 对外暴露应用(十四)
MyBatis完成增删改查案例(详细代码)
运动哪种耳机好用,推荐五款适合运动的耳机分享
【openSSH】通过证书文件免密码远程登录
c++模板进阶
app备案
线代9讲 第6讲
Ansible
【每日一题】—— C. Yarik and Array(Codeforces Round 909 (Div. 3))(贪心)
计算机基础学习(好文必看)
- 原文地址:https://blog.csdn.net/m0_67804957/article/details/142183410