-
使用Python实现强化学习算法
当谈论强化学习时,我们在讨论一种机器学习方法,其目标是教会智能体(agent)在与环境的交互中学习最优的行为策略,以最大化累积奖励。在本文中,我们将介绍强化学习的基本概念,并使用 Python 和 OpenAI 的 Gym 库来实现一个简单的强化学习算法:Q-learning。
1. 什么是强化学习?
强化学习是一种机器学习范式,其中智能体通过与环境的交互学习最佳行为策略。它与监督学习不同,因为它不依赖于标记的数据,而是通过试错和奖励来学习。在强化学习中,智能体采取行动并观察环境的反馈,然后根据反馈调整其行为,以最大化长期奖励。
2. Q-learning 算法简介
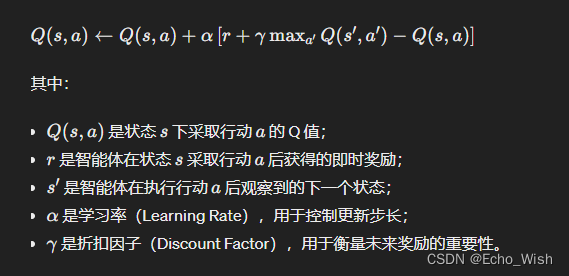
Q-learning 是一种基于值的强化学习算法,用于学习行动价值函数(Action-Value Function),即 Q 函数。该函数衡量在给定状态下采取特定行动的预期回报。
Q-learning 的基本原理是通过不断更新 Q 函数来学习最优策略。具体而言,Q-learning 使用贝尔曼方程(Bellman Equation)来更新 Q 值:
3. 使用 Python 和 Gym 实现 Q-learning
现在让我们使用 Python 和 OpenAI 的 Gym 库来实现一个简单的 Q-learning 算法,以解决 OpenAI Gym 中的经典问题:CartPole。
3.1 安装 Gym
首先,我们需要安装 Gym 库:
pip install gym- 1
3.2 实现 Q-learning 算法
接下来,我们将实现 Q-learning 算法来解决 CartPole 问题。
import gym import numpy as np # 创建 CartPole 环境 env = gym.make('CartPole-v1') # 初始化 Q 表 num_states = env.observation_space.shape[0] num_actions = env.action_space.n Q = np.zeros((num_states, num_actions)) # 设置超参数 alpha = 0.1 # 学习率 gamma = 0.99 # 折扣因子 epsilon = 0.1 # 探索率 # 定义 Q-learning 函数 def q_learning(env, num_episodes): for episode in range(num_episodes): state = env.reset() done = False while not done: # 选择行动 if np.random.rand() < epsilon: action = env.action_space.sample() # 随机探索 else: action = np.argmax(Q[state, :]) # 根据 Q 表选择最佳行动 # 执行行动并观察结果 next_state, reward, done, _ = env.step(action) # 更新 Q 值 Q[state, action] += alpha * (reward + gamma * np.max(Q[next_state, :]) - Q[state, action]) # 更新状态 state = next_state # 输出每个回合的奖励 print(f"Episode {episode + 1}: Total Reward = {reward}") return Q # 运行 Q-learning 算法 trained_Q = q_learning(env, num_episodes=1000) # 输出训练后的 Q 表 print("Trained Q-table:") print(trained_Q)- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
在上述代码中,我们首先创建了 CartPole 环境,并初始化了 Q 表。然后,我们定义了 Q-learning 函数,通过与环境的交互来更新 Q 表。最后,我们运行 Q-learning 算法并输出训练后的 Q 表。
4. 总结
在本文中,我们介绍了强化学习的基本概念和 Q-learning 算法,并使用 Python 和 OpenAI Gym 库实现了一个简单的 Q-learning 算法来解决 CartPole 问题。希望这篇教程能够帮助你理解强化学习的工作原理和实现方法!
-
相关阅读:
【云原生】SpringCloud系列之客户端负载均衡Ribbon
SpringSecurity
Neo4j图数据库和GDS图算法应用
Java设计模式之享元模式
【学习】常用深度学习算法有哪些
基于SSM的车辆维修管理系统
基于MobileNet的轻量级卷积神经网络实现玉米螟虫不同阶段识别分析
拷贝assets资源目录下xml文件到sdcard
transformer论文及其变种
Python滑动窗口算法:滑动窗口算法(4 by 4 sliding window price)
- 原文地址:https://blog.csdn.net/weixin_46178278/article/details/138205087
