-
永磁同步电机MTPA与弱磁控制
写在前面:本人能力、时间、技术有限,没有对一些细节进行深入研究和分析,也难免有不足和错误之处,欢迎交流和指正。本人写博客主要是学习过程的记录。
1、前言


2、最大转矩电流比(MTPA)控制数学推导

2.1 拉格朗日乘数法

2.2 定义法偏导求解

3、MTPA模型仿真搭建和分析
3.1 电机参数与设置

3.1.1 模型参数设置
Vdc=311; Rs=0.958; Ld=5.25e-3; Lq=12e-3; flux=0.1827; J=0.003; B=0.008; pole=4; fx=0;- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
3.1.2 参数计算脚本
function fcn() %4V/1000rpm r=0.958; Ld=5.25e-3; Lq=12e-3; Ts=0.0001; %Ke=4/1000; pole=4; J=0.003; B=0.008; flux=0.1827; fx=0; %由反电动势常数计算磁链 %flux=10*sqrt(6)*Ke/(pi*pole); % r : 欧姆 % LS:H %电流环PI计算 A=[Ld/r Lq/r]; wc=2*pi/(min(A)); kcpd=wc*Ld; kcpq=wc*Lq; kci=wc*r; %速度环PI计算 wn=wc/20; Ba_temp=(wn*J-B)/(1.5*pole*flux); %观察仿真结果,我们可以看出,系统响应速度较快,但是振荡得比较严重,系统不稳定。 %所以我们可以调节有功阻尼增益,减小有功阻尼增益,由表达式可以看出,转速环带宽与阻尼增益成正比。 % 根据自动控制原理可知,带宽越大,系统的快速性越好,稳定变差。B_a=0.13/10 B_a=0.013。PI参数不变。 Ba=Ba_temp/10; kvp=wn*J/(1.5*pole*flux); kvi=wn*kvp; %数据打印 str='wc value is: '; str=[str,num2str(wc)]; disp(str); str='kcpd value is: '; str=[str,num2str(kcpd)]; disp(str); str='kcpq value is: '; str=[str,num2str(kcpq)]; disp(str); str='kci value is: '; str=[str,num2str(kci)]; disp(str); str='wn value is: '; str=[str,num2str(wn)]; disp(str); str='Ba value is: '; str=[str,num2str(Ba)]; disp(str); str='kvp value is: '; str=[str,num2str(kvp)]; disp(str); str='kvi value is: '; str=[str,num2str(kvi)]; disp(str);- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
计算结果:

3.1.3 模型参数设置示意图

转子类型(Rotor type)选择Salient-pole(凸极型),其中round表示隐极型

3.2 模型总览
模型下载地址:永磁同步电机最大转矩电流比(MTPA)控制simulink仿真模型

3.3 核心模块-MTPA模块

MTPA计算脚本:function [id,iq] = fcn(Te,flux,Ld,Lq,pole) %计算iq f1=8*Te*flux/(3*pole); f2=Ld-Lq; f3=4*Te/(3*pole); v1=flux^2-4*((f2)^2); v2=(f3^2)-flux^2; iq=(f1+sqrt(f1^2-4*v1*v2))/(2*v1); %计算id id=(-flux+sqrt(flux^2 + 4*(f2^2)*(iq^2)))/(2*f2);- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
3.4 仿真分析
3.4.1 速度波形
给定速度(1000rpm)和速度反馈波形(MTPA控制策略):
给定速度(1000rpm)和速度反馈波形( i d ∗ = 0 i_d^*=0 id∗=0控制策略):

0.2s突加负载。可以看到在其它参数一致的情况下,MTPA比 i d ∗ = 0 i_d^*=0 id∗=0控制策略更稳。3.4.2 电流波形
i q i_q iq和 i d i_d id反馈波形(MTPA控制策略)

负载10Nm稳定后,q轴电流幅值稳定在8.916A,d轴电流幅值稳定在-2.820A。
i s i_s is波形(MTPA控制策略)

负载10Nm稳定后,定子电流幅值约为9.248A。
转矩波形(MTPA控制策略)

负载转矩约为10Nm。i q i_q iq和 i d i_d id反馈波形( i d ∗ = 0 i_d^*=0 id∗=0控制策略)

负载10Nm稳定后,q轴电流幅值稳定在9.994A且不稳定,d轴电流幅值稳定在约0 A。
i s i_s is波形( i d ∗ = 0 i_d^*=0 id∗=0控制策略)

转矩波形( i d ∗ = 0 i_d^*=0 id∗=0控制策略)

3.5 曲线拟合法
计算脚本:
function fcn() %----------------------------------------基本参数--------------------------------------------------------% %4V/1000rpm r=0.958; Ld=5.25e-3; Lq=12e-3; Ts=0.0001; %Ke=4/1000; pole=4; J=0.003; B=0.008; flux=0.1827; fx=0; %----------------------------------------PI等参数计算--------------------------------------------------------% %由反电动势常数计算磁链 %flux=10*sqrt(6)*Ke/(pi*pole); % r : 欧姆 % LS:H %电流环PI计算 A=[Ld/r Lq/r]; wc=2*pi/(min(A)); kcpd=wc*Ld; kcpq=wc*Lq; kci=wc*r; %速度环PI计算 wn=wc/20; Ba_temp=(wn*J-B)/(1.5*pole*flux); %观察仿真结果,我们可以看出,系统响应速度较快,但是振荡得比较严重,系统不稳定。 %所以我们可以调节有功阻尼增益,减小有功阻尼增益,由表达式可以看出,转速环带宽与阻尼增益成正比。 % 根据自动控制原理可知,带宽越大,系统的快速性越好,稳定变差。B_a=0.13/10 B_a=0.013。PI参数不变。 Ba=Ba_temp/10; kvp=wn*J/(1.5*pole*flux); kvi=wn*kvp; %----------------------------------------数据打印--------------------------------------------------------% str='wc value is: '; str=[str,num2str(wc)]; disp(str); str='kcpd value is: '; str=[str,num2str(kcpd)]; disp(str); str='kcpq value is: '; str=[str,num2str(kcpq)]; disp(str); str='kci value is: '; str=[str,num2str(kci)]; disp(str); str='wn value is: '; str=[str,num2str(wn)]; disp(str); str='Ba value is: '; str=[str,num2str(Ba)]; disp(str); str='kvp value is: '; str=[str,num2str(kvp)]; disp(str); str='kvi value is: '; str=[str,num2str(kvi)]; disp(str); %----------------------------------------计算id和Te拟合曲线 start--------------------------------------------------------% % 预分配数组用于保存结果 numIterations = 1001; % 0:0.1:100 共1001个点 idArray = zeros(1, numIterations); iqArray = zeros(1, numIterations); TeArray = zeros(1, numIterations); % 使用结构体保存数据 dataStruct = struct('iq', iqArray,'id', idArray, 'Te', TeArray); % 循环计算并保存结果 for idx = 1:numIterations iq = (idx - 1) * 0.1; % 计算当前 iq 值 % 计算 id 和 Te id = (-flux + sqrt(flux^2 + 4*((Ld-Lq)^2)*(iq^2))) / (2*(Ld-Lq)); Te = 0.75 * pole * iq * (flux + sqrt(flux^2 + 4*((Ld-Lq)^2)*(iq^2))); dataStruct.iq(idx)=iq; dataStruct.id(idx)=id; dataStruct.Te(idx)=Te; % 将结构体保存到工作空间 assignin('base', 'idTeData', dataStruct); % assignin('base', ['iq_' num2str(idx)], iq); % assignin('base', ['id_' num2str(idx)], id); % assignin('base', ['Te_' num2str(idx)], Te); end % 使用polyfit计算拟合的iq,id值 iqFitCoeff = polyfit(dataStruct.Te, dataStruct.iq, 4); disp('iqFitCoeff:'); disp(iqFitCoeff); idFitCoeff = polyfit(dataStruct.Te, dataStruct.id, 3); disp('idFitCoeff:'); disp(idFitCoeff); % 使用polyval计算拟合曲线 iqFit = polyval(iqFitCoeff, dataStruct.Te); idFit = polyval(idFitCoeff, dataStruct.Te); % 绘制图像 figure; % 绘制原始数据点 plot(dataStruct.Te, linspace(0, 100, numIterations), 'r*', 'DisplayName', 'Original Data'); hold on; plot(dataStruct.Te, dataStruct.id, 'g*', 'DisplayName', 'Original Data'); % 绘制拟合曲线 plot(dataStruct.Te, iqFit, 'b', 'DisplayName', 'Fitted iq Curve'); plot(dataStruct.Te, idFit, 'm', 'DisplayName', 'Fitted id Curve'); % 添加标签和图例 xlabel('Te'); ylabel('Values'); title('Fitted Curves for iq and id'); legend; % 重置图形 hold off; % 将拟合系数保存到工作空间 assignin('base', 'idFitCoeff', idFitCoeff); %----------------------------------------计算id和Te拟合曲线 end--------------------------------------------------------%- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
计算结果:



仿真模块:

3.6 查表法
首先需要确保workspace有表数据,本文使用3.5章节已有的数据,如下图:

查表法模块:


其中,其它模块以此类推

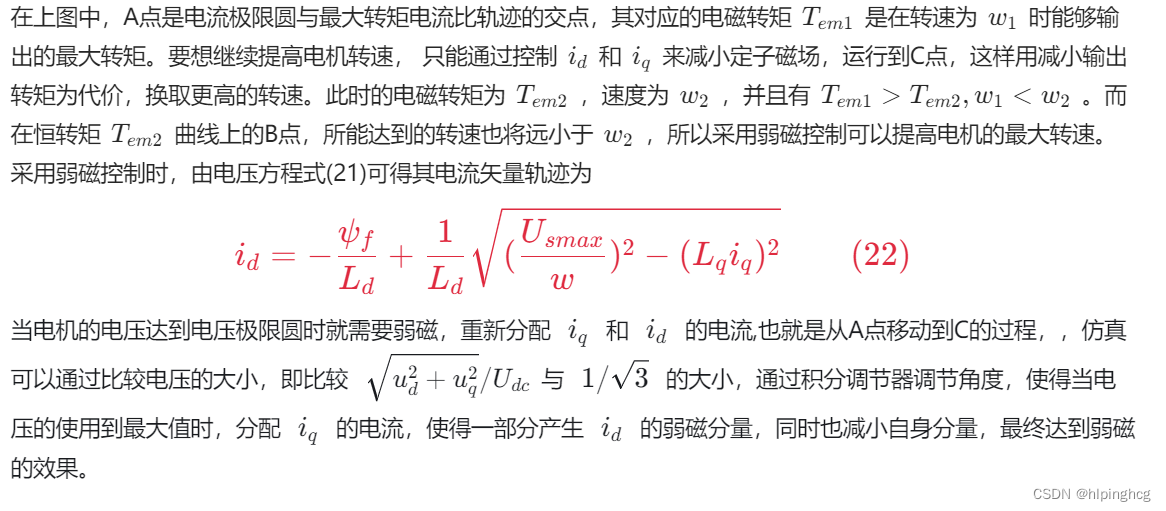
4、从MTPA到弱磁的转变
5、弱磁控制数学推导


6、弱磁控制模型仿真搭建与分析
弱磁控制方法常用的有:

6.1 控制方法对比

这里使用超前角弱磁控制。6.2 超前角弱磁控制实现

6.3 模型总览
模型下载地址: 永磁同步电机最大转矩电流比(MTPA)控制+弱磁控制simulink仿真模型

6.4 弱磁控制模块
MTPA+弱磁:

超前角弱磁:

6.5 控制效果
转速给定与速度反馈波形:

额定转速1000rpm,超过1000rpm控制正常,最后稳定在2100rpm。0.2s的波动是加了5 Nm的负载。达到控制效果。
磁链轨迹如下:

7、参考
[1] 宫伟迪. 基于电动飞机永磁同步电机的MTPA控制研究[D].沈阳航空航天大学,2022.DOI:10.27324/d.cnki.gshkc.2022.000062.
[2] PMSM 的弱磁控制(使用 MTPA)
https://ww2.mathworks.cn/help/mcb/gs/field-weakening-control-mtpa-pmsm.html
[3] 电控3:从电压矢量角度来理解“永磁同步电机弱磁控制
https://zhuanlan.zhihu.com/p/652838870
[4] 电控4:永磁同步电机MTPA与弱磁控制的统一理解:
https://zhuanlan.zhihu.com/p/654926284
[5] 永磁同步电机的矢量控制策略(十二)一一一MTPA最大转矩电流比控制:
https://blog.csdn.net/qq_42249050/article/details/107451798
[6] 永磁同步电机最大转矩电流比(PMSM-MTPA)Simulink仿真教程:
https://zhuanlan.zhihu.com/p/385828327
[7] 基于MPTA+弱磁控制(直接计算法)+电流解耦器PMSM系统simulink实现
https://blog.csdn.net/weixin_44312889/article/details/124467496
[8] 理解弱磁控制及其一种工程实现方法
https://zhuanlan.zhihu.com/p/441544928
[9] 永磁同步电机矢量控制(六)——弱磁控制
https://zhuanlan.zhihu.com/p/648282522 -
相关阅读:
Effective Modern C++[实践]->理解模板类别的推导
截图快捷键ctrl加什么
论人类下一代语言的可能—4.2算术后的发展
Feign远程调用
android 垂直方向进度条progressbar
把SQL搞坏了,求修复教程
宜搭,怎么在公式编辑中计算百分比的和?
【操作系统】保姆级教程(VMware)Ubuntu+qemu+xv6安装调试
新唐NUC980使用记录:开发环境准备与编译配置基础说明
java毕业设计远程教育系统Mybatis+系统+数据库+调试部署
- 原文地址:https://blog.csdn.net/qq_28149763/article/details/136348643