-
四轴飞行器的电池研究(Matlab&Simulink仿真)
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录

💥1 概述
四轴飞行器的电池为发动机、飞行控制器和接收器等部件供电。了解电池动态是很重要的。电池电压、电流和安培小时容量都是了解电池的重要参数。在仿真域中,电池的输入为取电流,输出电压。状态包括电荷、电压、电流和温度的状态。其中一些参数包括电池容量和放电速率。
看看四轴飞行器的LiPo电池数据表,可以在下面看到,有多个术语可以被定义。

从容量开始,这是衡量电池可以容纳多少电量的标准。这个等级在毫安小时单位,表示电池每小时能持续提供多少电流。为如上图所示,它可以持续提供700mA或0.7A的电流,持续1小时。
接下来是配置,这与电池内的电池数量有关。每个单元格,也就是" S "计数电源约3.7伏特。上面的电池有一个3S配置,这意味着3个电池,这共同提供11.1伏电压[13]。这个电压对于马达来说很重要,因为每个马达都有一个千伏额定值,告诉有多快的电机将运行每伏特供应。例如,5000千伏电机将运行在50,000 RPM,如果提供10伏。随着电池数量的增加,电机可以旋转得更快
恒定放电和峰值放电与电源可以安全地提供多少电流有关电池。要使这些数字有用,还需要知道电池容量。求连续电流的公式是容量(安培)乘以恒定放电,或峰值放电C额定值。的结果将给出恒定和突发电流量。例如,安全电流放电率为60次0.7A等于42A,这意味着电池可以安全地提供42安培。
详细文章讲解见第4部分。
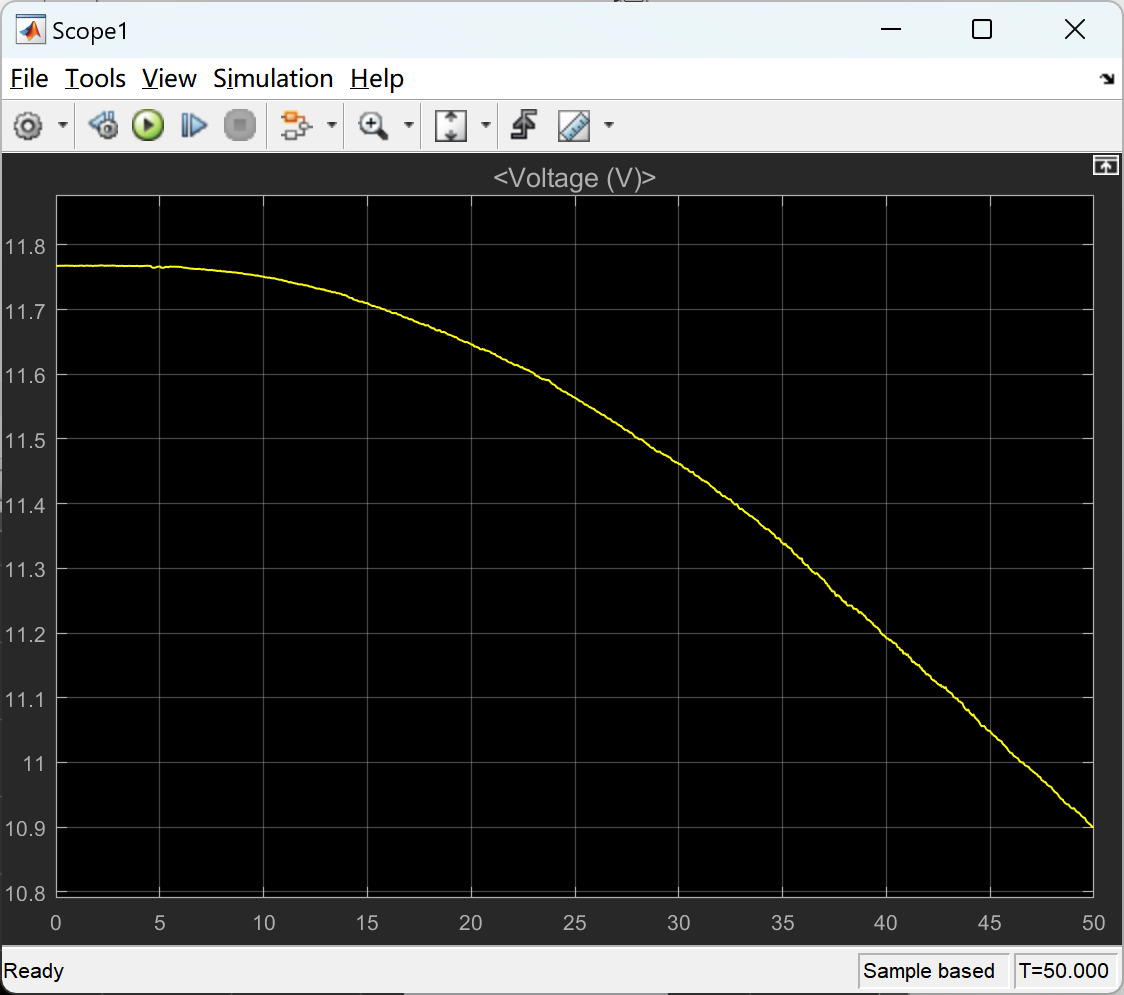
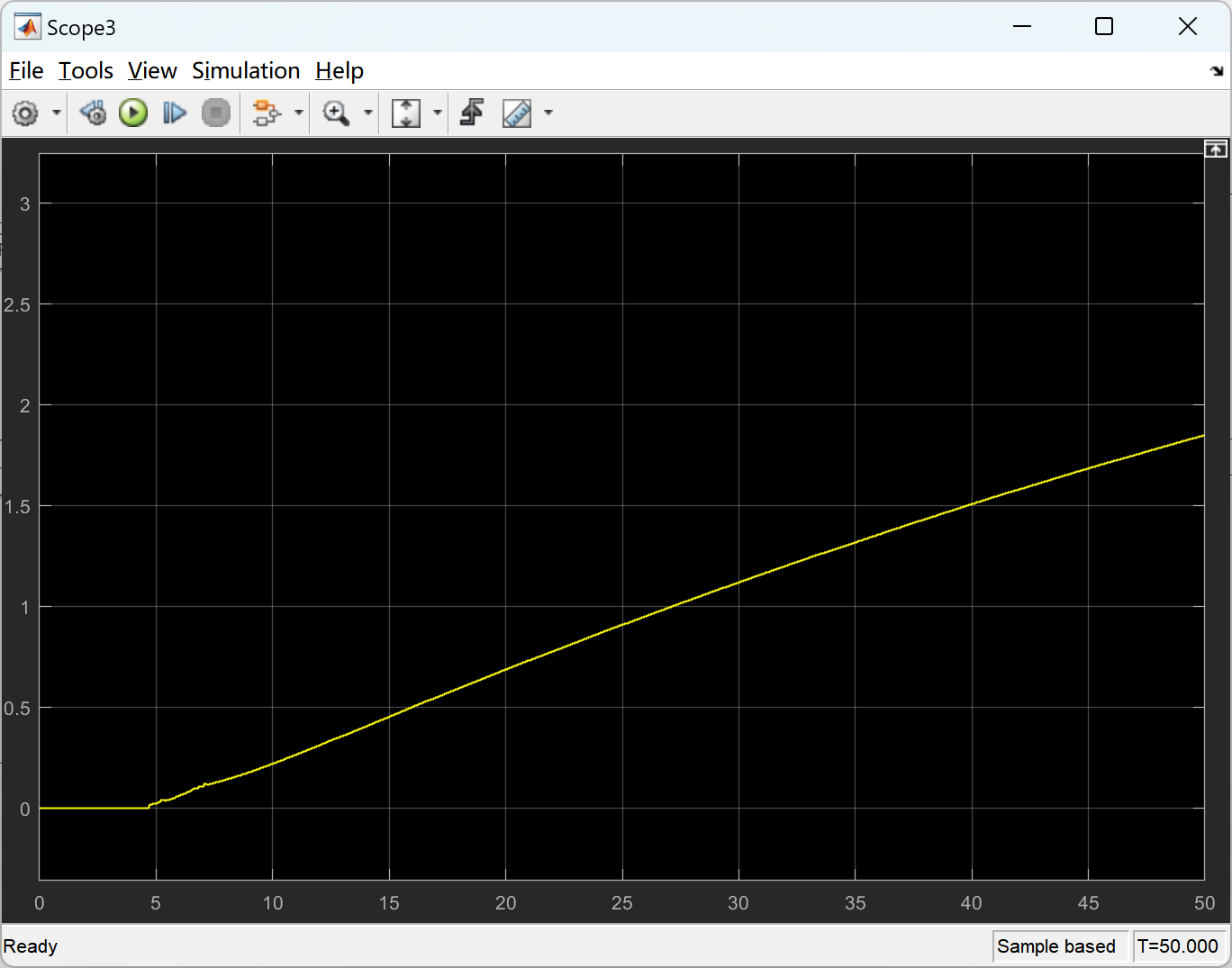
📚2 运行结果


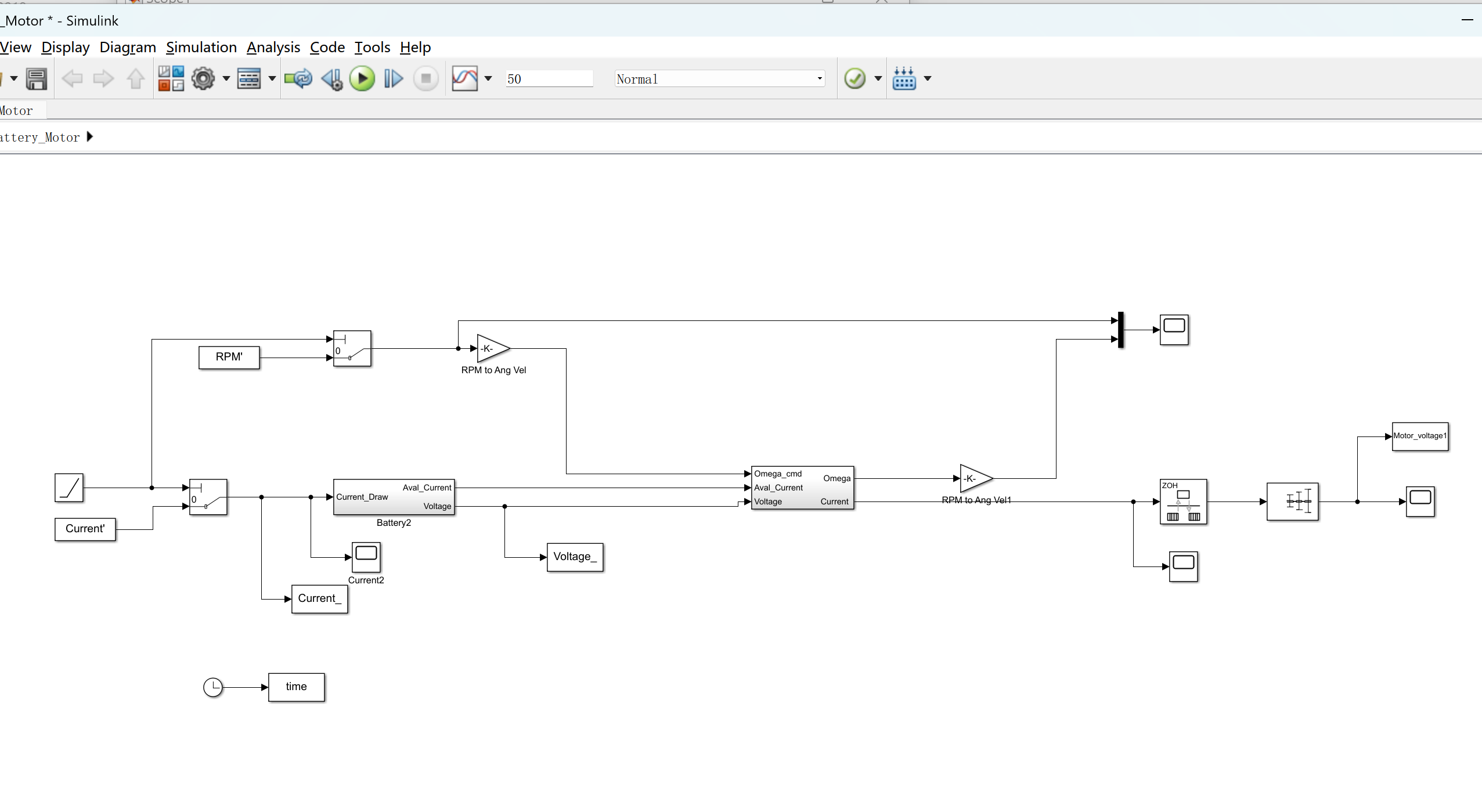

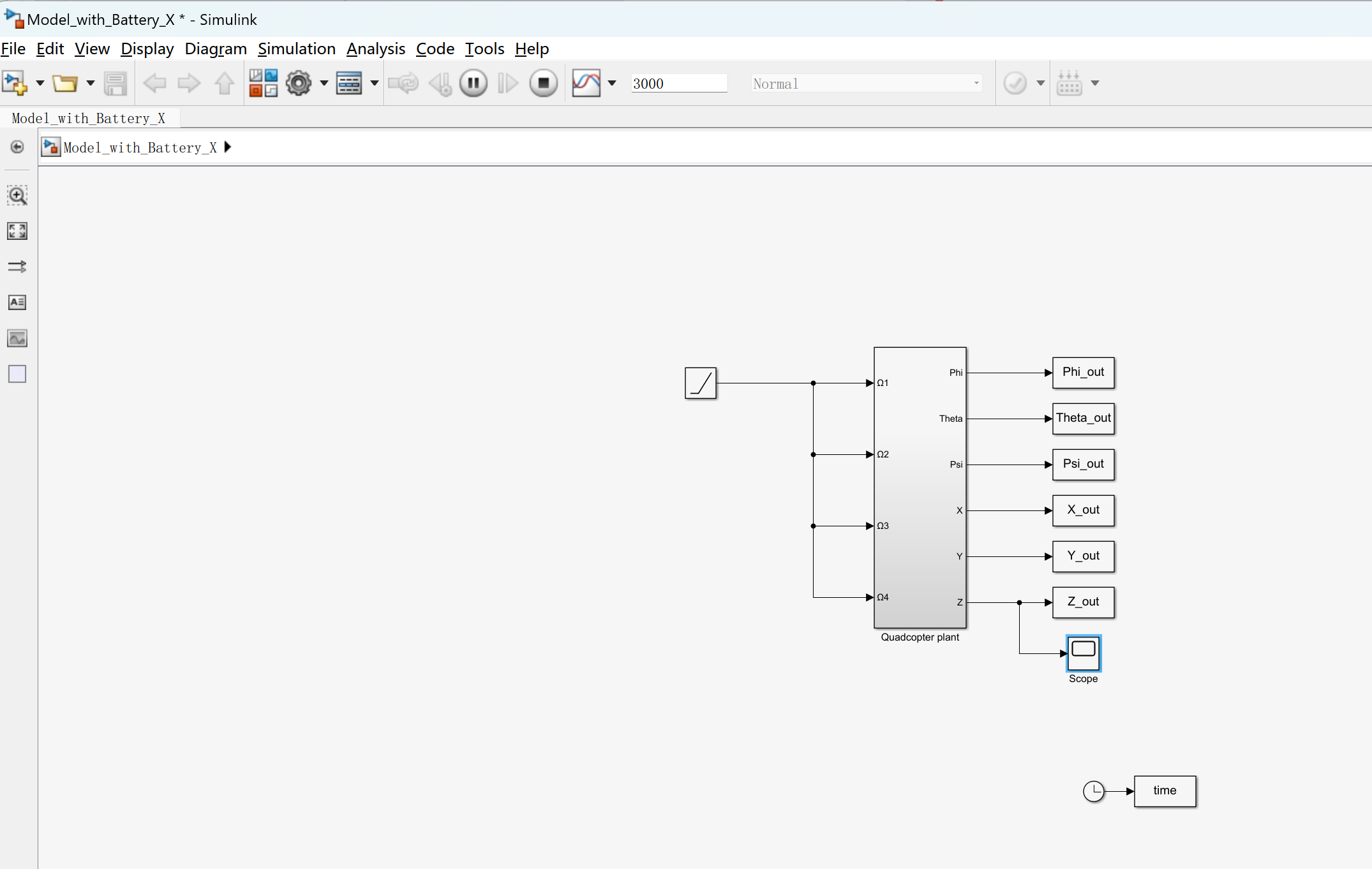
部分代码:
% Quadrotor constants
Ixx = 7.5*10^(-3); % Quadrotor moment of inertia around X axis
Iyy = 7.5*10^(-3); % Quadrotor moment of inertia around Y axis
Izz = 1.3*10^(-2); % Quadrotor moment of inertia around Z axis
Jr = 6.5*10^(-7); % Total rotational moment of inertia around the propeller axis 6.5*10^(-6)
b = 1.144e-08; % Thrust factor
d = 9.94e-10; % Drag factor 1.0876e-9
l = 0.23; % Distance to the center of the Quadrotor
g = 9.81; % Gravitational acceleration
weight =.284; %kg Weight=mg (from a scale)
m = weight/g; % Mass of the Quadrotor in Kg
b_m=2.415e-6; %Motor damping
R=0.117; %Motor Resistance
L=0.001*R; %Electric Inductance
Kemf=0.00255; %Back electromotive force constant
Kt=Kemf;
C=700; %mAh
PD=120; %Peak Discharge
CD=60; %Constant Dishcharge
Amps=C/1000;
Operating_current=Amps*CD;
Max_current=Amps*PD;
Volts=11.1;
[Data,Header,raw]=xlsread('Continuous_2017-11-01_145046_10inc_0to2000andBack.csv');
[M,I] = max(Data(:,12));
Time=Data(1:I,1);
Voltage=Data(1:I,11);
Current=Data(1:I,12);🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
🌈4 Matlab代码、Simulink实现、文章
-
相关阅读:
网络探索之浏览器解析URL
人工智能知识全面讲解:自然语言处理概述
28、iNeRF
SpringBoot 引入 smart-doc 接口文档管理插件,以及统一接口返回
Three.js加载360全景图片/视频
IP分片、TCP分段
数据安全常用术语表 V0.1 附下载地址
DB2 HADR+TSA运维,TSA添加资源组的命令
统计目标成绩的出现次数(数字在排序数组中出现次数),剑指offer,力扣
【Docker】windows环境下的docker如何开放远程2375端口
- 原文地址:https://blog.csdn.net/m0_64583023/article/details/132564183