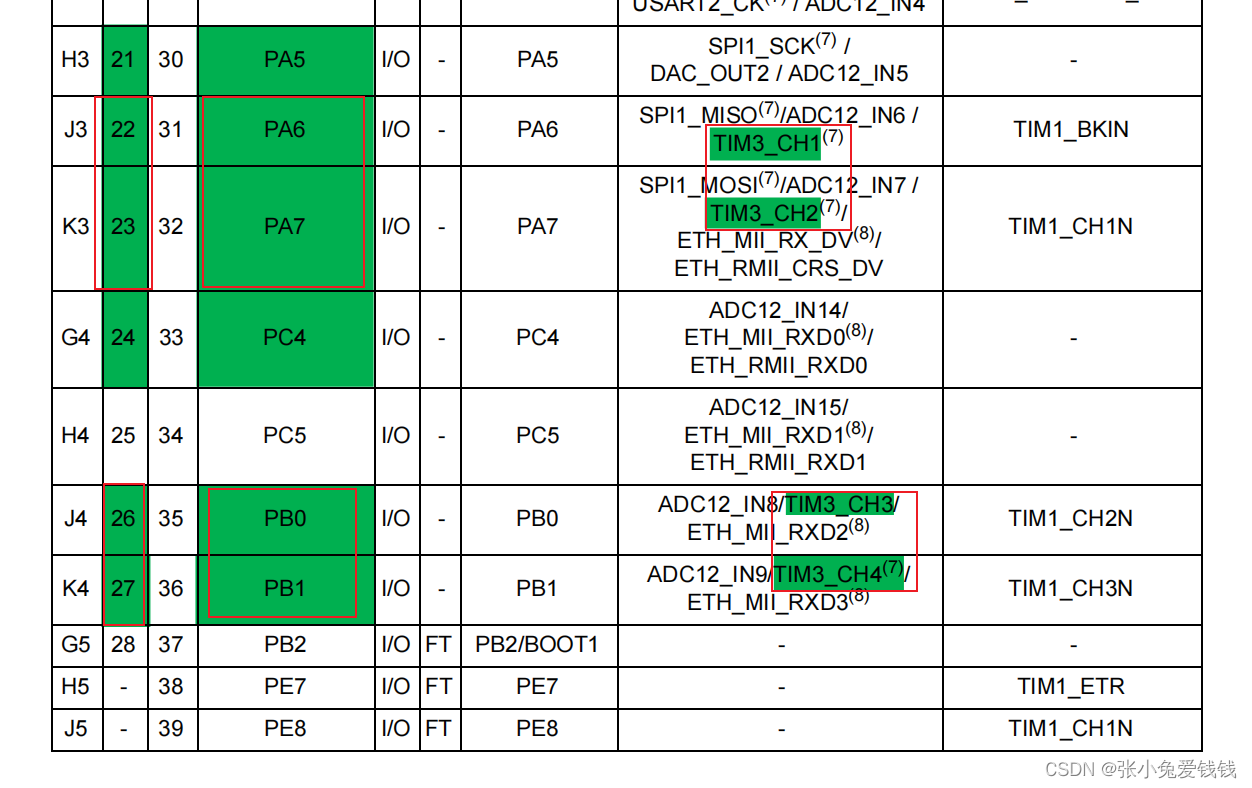
1. TIM3的GPIO口,查阅STM32F105RBT6 数据手册,TIM3的4通道用的是PB1

2. 初始化GPIO口和定时器TIM3
2.1 相关函数
RCC_APB1PeriphClockCmd、GPIO_Init、TIM_TimeBaseInit、TIM_OC4Init、TIM_OC4PreloadConfig、NVIC_Init、TIM_ITConfig、TIM_Cmd、
void TIM3_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
TIM_TimeBaseInitTypeDef TIM_InitStruct;
TIM_OCInitTypeDef TIM_OCInitStruct;
NVIC_InitTypeDef NVIC_InitStruct;
// Enable clock for TIM3 and GPIOB
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3 | RCC_APB2Periph_GPIOB, ENABLE);
// Initialize GPIOB to output PWM signal
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_1;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStruct);
// Initialize TIM3 for PWM generation with interrupt on update
TIM_InitStruct.TIM_Prescaler = 0; // Set PWM frequency to 72MHz (72 MHz / (0 + 1))
TIM_InitStruct.TIM_Period = 999;
TIM_InitStruct.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_InitStruct.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM3, &TIM_InitStruct);
TIM_OCInitStruct.TIM_OCMode = TIM_OCMode_PWM1;
TIM_OCInitStruct.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStruct.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OCInitStruct.TIM_Pulse = 500; // Duty cycle = 50%
TIM_OC4Init(TIM3, &TIM_OCInitStruct);
TIM_OC4PreloadConfig(TIM3, TIM_OCPreload_Enable);
NVIC_InitStruct.NVIC_IRQChannel = TIM3_IRQn;
NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority = 4;
NVIC_InitStruct.NVIC_IRQChannelSubPriority = 0;
NVIC_InitStruct.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStruct);
TIM_ITConfig(TIM3, TIM_IT_Update, ENABLE);
TIM_Cmd(TIM3, ENABLE);
}

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
3. 中断入口 TIM3_IRQHandler
3.1 在启动文件里面找到TIM3 对应的中断入口函数,也就是中断服务函数 TIM3_IRQHandler

4. 编写中断服务函数
void TIM3_IRQHandler(void)
{
if (TIM_GetITStatus(TIM3, TIM_IT_Update) == SET) // overflow interrupt
{
printf("龙傲天说,我三岁拳打南山不老院,四岁脚踢北海幼儿园\r\n");
}
TIM_ClearITPendingBit(TIM3,TIM_IT_Update); // clear interrupt flag
// Handle interrupt by updating PWM duty cycle value
// static uint16_t duty_cycle = 500; // Initial value of 50%
// duty_cycle = duty_cycle < 950 ? duty_cycle + 50 : 0; // Increase duty cycle by 5% every period
// TIM_SetCompare4(TIM3, duty_cycle);
}
4.1 中断服务函数需要快速地执行完毕。中断服务函数应该避免执行太多的计算复杂度较高的操作,否则可能会导致中断响应时间过长,甚至因为延迟而导致系统不稳定。
4.2 如果你需要在中断服务函数中访问全局变量,需要将这些变量定义为volatile类型。这是因为中断服务函数可能会在任何时间被外部中断所打断,如果没有使用volatile类型,就有可能导致变量值不准确。
4.3 在中断服务函数的结尾处,需要调用NVIC_ClearPendingIRQ()函数来清除中断挂起位。
4.4 中断函数最好别用printf 函数等耗时、有可能阻塞的一些函数,printf函数本身就比较耗时,在中断服务函数中调用的话,可能会导致中断响应时间过长,使系统不稳定。如果在中断服务函数中使用了printf函数,可能会导致printf函数与被打断的低优先级代码发生冲突,造成数据异常。我这里用 printf 只是为了装13,我龙傲天谁都不服
4.4 中断服务函数需要快速、简洁、有效地处理中断,并且需要小心地处理共享资源和全局变量。
5. 主函数调用一下初始化函数就可以了
int main(void)
{
TIM3_Init();
while (1)
{
printf("剑圣来了,快跑");
}
}
5.1 如果没有成功输出pwm波,可能是初始化时序不对,前面已经操作过该IO口了,我有很多的例程放在一起,搞混了,需要把原来的操作去掉,屏蔽掉,或者调整一下 TIM3_Init() 的位置,如果有很多别的初始化函数,就把TIM3_Init() 放到后面一点试试

6. 串口数据

7. 拿示波器或者逻分仪去量PB1 引脚,看波形,有毛刺,我没滤波的,可以处理掉


8. PWM 波频率、周期计算
8.1 频率 F = SYSCLK / ((TIM_Prescaler + 1) / (TIM_Period + 1))
8.2 周期 T = 1 / F
8.3 制造一个频率是1 Hz的PWM 波,周期 1s, 占空比50%,改下面三个参数值就行了
TIM_InitStruct.TIM_Prescaler = 7199;
TIM_InitStruct.TIM_Period = 10000;
TIM_OCInitStruct.TIM_Pulse = 5000; // 占空比50% = 5000 / (TIM_Period + 1)

9. TIM3的四个通道输出四路PWM,各个通道之间输出的PWM是独立的,频率,占空比可单独设置
void TIM3_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
TIM_TimeBaseInitTypeDef TIM_InitStruct;
TIM_OCInitTypeDef TIM_OCInitStruct;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3 | RCC_APB2Periph_GPIOA | RCC_APB2Periph_GPIOC | RCC_APB2Periph_AFIO, ENABLE);
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStruct);
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_4;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_Init(GPIOC, &GPIO_InitStruct);
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_5;
GPIO_Init(GPIOA, &GPIO_InitStruct);
/*
* Initialize TIM3 for generation PWM
* Set PWM frequency to 72kHz (72 MHz / (999 + 1) / (0 + 1)), TIM3_FRQ = SYSCLK / ((TIM_Period + 1) * (TIM_Prescaler + 1))
* STM32F105RBT6_PB1 - TIM3_Ch4
*/
TIM_InitStruct.TIM_Prescaler = 7199; // 0, 7199
TIM_InitStruct.TIM_Period = 9999; // 999, 9999
TIM_InitStruct.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_InitStruct.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM3, &TIM_InitStruct);
TIM_OCInitStruct.TIM_OCMode = TIM_OCMode_PWM1;
TIM_OCInitStruct.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStruct.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OCInitStruct.TIM_Pulse = 5000; // 500,5000 Duty cycle = 50%
TIM_OC1Init(TIM3, &TIM_OCInitStruct);
TIM_OC1PreloadConfig(TIM3, TIM_OCPreload_Enable);
TIM_OC2Init(TIM3, &TIM_OCInitStruct);
TIM_OC2PreloadConfig(TIM3, TIM_OCPreload_Enable);
TIM_Cmd(TIM3, ENABLE);
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
主函数调用,使能每个通道输出
while (1) {
TIM_SetCompare1(TIM3, 5000);
TIM_SetCompare2(TIM3, 5000);
TIM_SetCompare4(TIM3, 5000);
}